
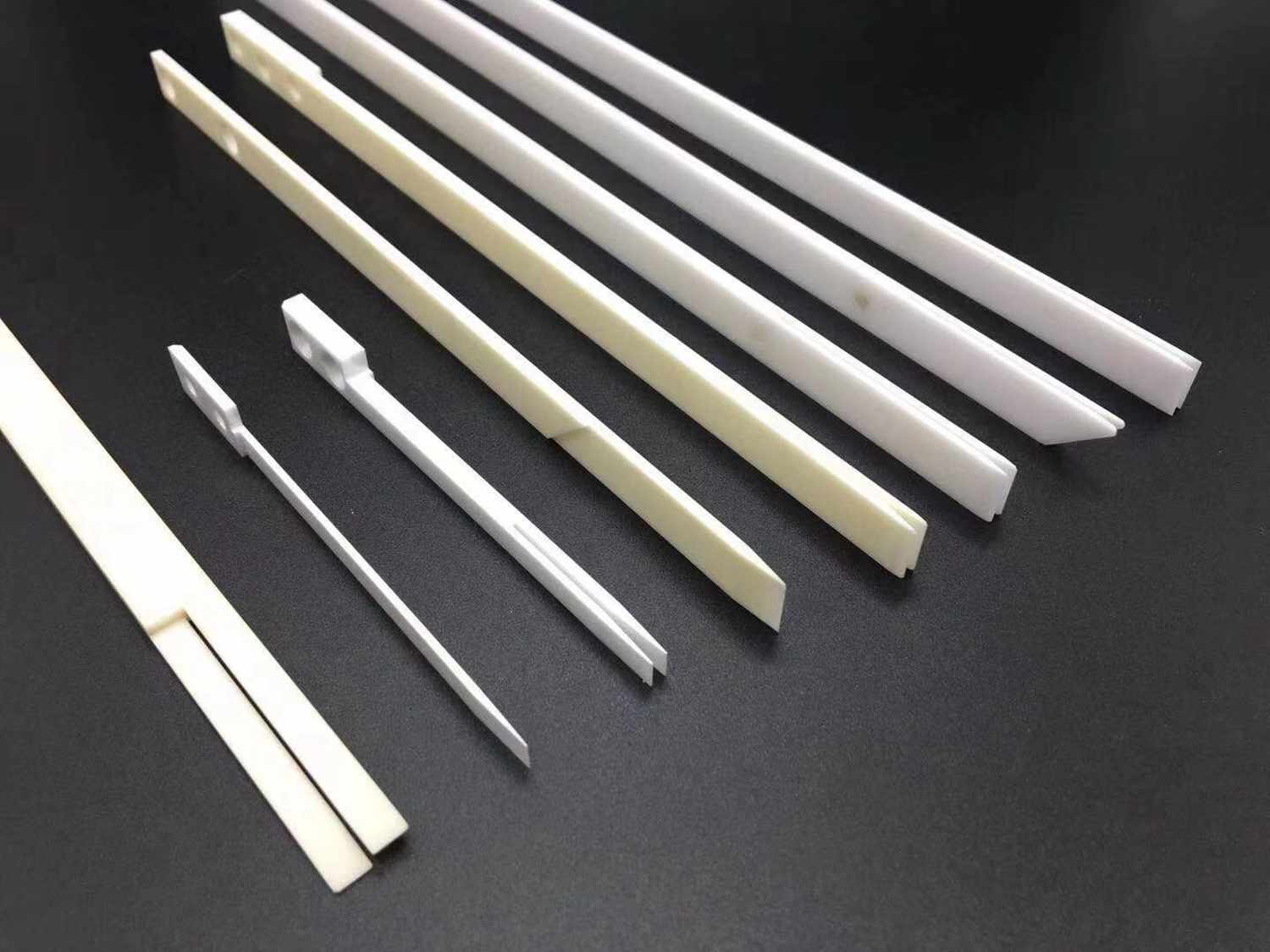
深圳進(jìn)口晶圓運(yùn)送機(jī)械吸臂上門服務(wù) 深圳市德澳美精密制造供應(yīng)
發(fā)貨地點(diǎn):廣東省深圳市
發(fā)布時(shí)間:2026-05-06

發(fā)貨地點(diǎn):廣東省深圳市
發(fā)布時(shí)間:2026-05-06
與剛性機(jī)械臂相比較,柔性機(jī)械臂具有結(jié)構(gòu)輕、載重/自重比高等特性,因而具有較低的能耗、較大的操作空間和很高的效率,其響應(yīng)快速而準(zhǔn)確,有著很多潛在的優(yōu)點(diǎn),在工業(yè)、國(guó)防等應(yīng)用領(lǐng)域中占有十分重要的地位。隨著宇航業(yè)及機(jī)器人業(yè)的飛速發(fā)展,越來越多地采用由若干個(gè)柔性構(gòu)件組成的多柔體系統(tǒng)。傳統(tǒng)的多剛體動(dòng)力學(xué)的分析方法及控制方法已不能滿足多柔體系統(tǒng)的動(dòng)力分析及控制的要求。柔性機(jī)械臂作為簡(jiǎn)單的非平凡多柔體系統(tǒng),被用作多柔體系統(tǒng)的研究模型。 合理選擇機(jī)械手的坐標(biāo)形式。直角坐標(biāo)式機(jī)械手的位置精度較高,其結(jié)構(gòu)和運(yùn)動(dòng)都比較簡(jiǎn)單、誤差也小。深圳進(jìn)口晶圓運(yùn)送機(jī)械吸臂上門服務(wù)
電動(dòng)式 電力驅(qū)動(dòng)是目前機(jī)械臂使用得最多的一種驅(qū)動(dòng)方式。其特點(diǎn)是電源方便,響應(yīng)快,驅(qū)動(dòng)力較大(關(guān)節(jié)型的持重已達(dá)400公斤),信號(hào)檢測(cè)、傳遞、處理方便,并可以采用多種靈活的控制方案。驅(qū)動(dòng)電機(jī)一般采用步進(jìn)電機(jī),直流伺服電機(jī)以及交流伺服電機(jī)(其中交流伺服電機(jī)為目前主要的驅(qū)動(dòng)形式)。由于電機(jī)速度高,通常采用減速機(jī)構(gòu)(如諧波傳動(dòng)、RV擺線針輪傳動(dòng)、齒輪傳動(dòng)、螺旋行動(dòng)和多桿式機(jī)構(gòu)等)。目前,有些機(jī)械臂已開始采用無減速機(jī)構(gòu)的大轉(zhuǎn)矩、低轉(zhuǎn)速的電機(jī)進(jìn)行直接驅(qū)動(dòng)(DD),這既可以使機(jī)構(gòu)簡(jiǎn)化,又可提高控制精度。二、按用途分⒈搬運(yùn)機(jī)械臂 這種機(jī)械臂用途很廣,一般只需點(diǎn)位控制。即被搬運(yùn)零件無嚴(yán)格的運(yùn)動(dòng)軌跡要求,只要求始點(diǎn)和終點(diǎn)位姿準(zhǔn)確。如機(jī)床上用的上下料器人,工件堆垛機(jī)械臂,注塑機(jī)配套用的機(jī)械等。深圳正規(guī)晶圓運(yùn)送機(jī)械吸臂生產(chǎn)廠家怎么選擇在工業(yè)制造、醫(yī)學(xué)***、娛樂服務(wù)、***、半導(dǎo)體制造以及太空探索等領(lǐng)域都能見到它的身影。
建模理論柔性機(jī)械臂動(dòng)力學(xué)方程的建立主要是利用Lagrange方程和NeWton-Euler方程這兩個(gè)相當(dāng)有代表性的方程。另外比較常用的還有變分原理,虛位移原理以及Kane方程的方法。而柔性體變形的描述是柔性機(jī)械臂系統(tǒng)建模與控制的基礎(chǔ)。因此因首先選擇一定的方式描述柔性體的變形,同時(shí)變形的描述與系統(tǒng)動(dòng)力學(xué)方程的求解關(guān)系密切。[3]柔性體變形的描述主要有以下幾種:1)有限元法;2)有限段法;3)模態(tài)綜合法;4)集中質(zhì)量法;動(dòng)力學(xué)方程的建立無論是連續(xù)或離散的動(dòng)力學(xué)模型,其建模方法主要基于兩類基本方法:矢量力學(xué)法和分析力學(xué)法。應(yīng)用較***同時(shí)也是比較成熟的是Newton-Euler公式、Lagrange方程、變分原理、虛位移原理和Kane方程。
例如:尋找,運(yùn)輸,握取,對(duì)準(zhǔn),裝配,檢驗(yàn)等動(dòng)作. 為了明確地描述工業(yè)機(jī)械人,美國(guó)機(jī)械人協(xié)會(huì)在1979年將機(jī)械人定義為一個(gè)可用程式控制,多功能的操作器,它透過程式控制和多變化的動(dòng)作設(shè)計(jì)來移動(dòng)材料,工件,工具或特別設(shè)備,以完成一連串的工作.所以,雖然許多工業(yè)機(jī)械人并非有人的形態(tài),但只要它們符合機(jī)械人的定義,便可以稱為機(jī)械人.工業(yè)機(jī)械人雖然已被廣泛應(yīng)用在多種制造行業(yè)內(nèi),但估計(jì)在不久將來還會(huì)有數(shù)以十萬計(jì)的工業(yè)機(jī)械人投入服務(wù).現(xiàn)時(shí),不少研究人員正為機(jī)械人研究如何加入視覺和感覺,令機(jī)械人可以完成更復(fù)雜的工作.而研究機(jī)械人的學(xué)問稱為機(jī)械人學(xué)。機(jī)械手的剛度、偏重力矩、慣性力及緩沖效果都直接影響手臂的位置精度。

晶圓是指硅半導(dǎo)體集成電路制作所用的硅晶片,由于其形狀為圓形,故稱為晶圓;在硅晶片上可加工制作成各種電路元件結(jié)構(gòu),而成為有特定電性功能的集成電路產(chǎn)品。
晶圓的原始材料是硅,而地殼表面有用之不竭的二氧化硅。二氧化硅礦石經(jīng)由電弧爐提煉,鹽酸氯化,并經(jīng)蒸餾后,制成了高純度的多晶硅,其純度高達(dá)99.9%。
晶圓是制造半導(dǎo)體芯片的基本材料,半導(dǎo)體集成電路最主要的原料是硅,因此對(duì)應(yīng)的就是硅晶圓。 關(guān)節(jié)式機(jī)械手因其結(jié)構(gòu)復(fù)雜。廣東官方晶圓運(yùn)送機(jī)械吸臂價(jià)格便宜 該機(jī)械臂由用戶的頭腦完全控制,靈巧到足以拿起一個(gè)玻璃杯,在沒有其他人幫助的情況下喝掉一杯飲料。深圳正規(guī)晶圓運(yùn)送機(jī)械吸臂生產(chǎn)廠家怎么選擇
加設(shè)定位裝置和行程檢測(cè)機(jī)構(gòu)。深圳進(jìn)口晶圓運(yùn)送機(jī)械吸臂上門服務(wù)
裝配機(jī)械人 ;這燈機(jī)械臂要有較高的位姿精度,手腕具有較大的柔性。目前大多用于機(jī)電產(chǎn)品的裝配作業(yè)。⒌專門用途的機(jī)械臂 如醫(yī)用護(hù)理機(jī)械臂、航天用機(jī)械臂、探海用機(jī)械臂以及排險(xiǎn)作業(yè)機(jī)械臂等。三、按操作機(jī)的位置機(jī)構(gòu)形式和自由度數(shù)量分類機(jī)械臂操作機(jī)的位置機(jī)構(gòu)型式是機(jī)械臂重要的外形特征,按這一類標(biāo)準(zhǔn),機(jī)械臂可分為直角坐標(biāo)型,圓柱坐標(biāo)型,球(極)坐標(biāo)型、關(guān)節(jié)型機(jī)械臂(或擬人機(jī)械臂)。操作機(jī)本身的軸數(shù)(自由度數(shù))最能反應(yīng)機(jī)械臂的工作能力,也是分類的重要依據(jù)。按這一分類要求,機(jī)械臂可分為4軸(自由度)、5軸(自由度)、6軸(自由度)、7軸(自由度)等機(jī)械臂。還有其它多種分類方式。基本介紹工業(yè)設(shè)計(jì)工業(yè)機(jī)械人通常由六項(xiàng)基本元素所組成,包括:結(jié)構(gòu),臂端工具,電腦數(shù)碼控制器,驅(qū)動(dòng)器,量度回輸系統(tǒng)和感應(yīng)器。深圳進(jìn)口晶圓運(yùn)送機(jī)械吸臂上門服務(wù)
“氧化鋁陶瓷|氧化鋯陶瓷|碳化硅陶瓷|陶瓷機(jī)械手”深圳市德澳美精密制造有限公司,公司位于:深圳市龍華區(qū)龍華街道清湖社區(qū)清湖安之龍工業(yè)園B棟201,多年來,德澳美堅(jiān)持為客戶提供好的服務(wù)。歡迎廣大新老客戶來電,來函,親臨指導(dǎo),洽談業(yè)務(wù)。德澳美期待成為您的長(zhǎng)期合作伙伴!




