江蘇大型全地形履帶式心戰機器人規格
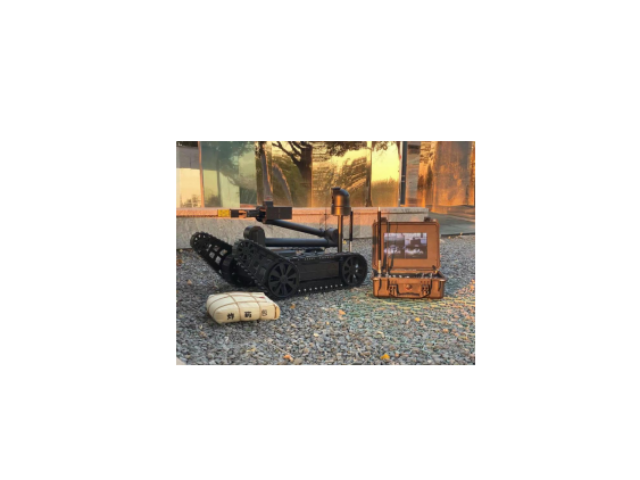
導航系統采用激光SLAM與視覺慣性里程計融合的定位方案,通過360°旋轉激光雷達構建厘米級精度的三維環境地圖,同時利用雙目立體視覺系統識別地形特征點。在復雜場景中,系統通過卡爾曼濾波算法融合IMU、GPS與編碼器數據,將定位誤差控制在±5cm范圍內。路徑規劃模塊基于A*算法與動態窗口法,可實時計算好的行進路線,并通過模糊PID控制器調整兩側履帶轉速差,實現0.1°/s的轉向精度。特別設計的心理戰任務模塊集成多模態交互系統,包括可變焦距高清攝像機、定向聲波發射器與全息投影裝置。當機器人接近目標區域時,系統通過激光雷達識別人員分布,自動調整行進路線至有效傳播范圍,同時啟動心理戰裝備:聲波發射器可定向投射頻率18-22kHz的次聲波干擾,全息投影裝置能生成3D虛擬影像,配合預先錄制的心理戰音頻實現多維度信息滲透。這種將環境感知、自主導航與心理戰裝備深度集成的系統架構,使機器人能在無人干預情況下完成24小時持續作戰任務。履帶式機器人能承載較大重量,使物資運輸機器人可運輸更多種類物資。江蘇大型全地形履帶式心戰機器人規格
小型履帶式心戰機器人的工作原理深度融合了機械傳動、環境感知與智能決策技術,其重要在于通過履帶式底盤實現復雜地形的穩定移動,并依托多傳感器系統完成戰場心理戰信息的精確采集與動態干預。履帶行走機構采用四輪一帶結構,即驅動輪、支重輪、導向輪、拖帶輪與強度高橡膠履帶協同工作,驅動輪通過永磁直流電機直接驅動,電機轉速經行星減速器降速增扭后傳遞至履帶,確保機器人能在沙地、碎石坡、泥濘等非結構化地形中保持低打滑率與高通過性。履帶式全彩夜視巡防偵察機器人生產公司履帶式機器人的履帶耐磨,這讓物資運輸機器人在長期運輸中可靠性增強。

全地形履帶式機器人作為特種作業裝備的典型標志,憑借其獨特的機械結構與智能控制系統,在復雜環境作業中展現出不可替代的優勢。其重要設計理念源于對非結構化地形的深度適應,通過雙履帶差速轉向機構與可變幅擺臂的協同工作,可實現45°斜坡攀爬、30cm障礙跨越及泥濘、沙地等松軟地面的穩定通行。相較于輪式或足式機器人,履帶與地面的接觸面積更大,單位壓力明顯降低,這種特性使其在搶險救援場景中能夠穿越廢墟瓦礫,在農業領域可深入濕滑稻田執行植保作業,在極地科考中更能抵御零下50℃的低溫環境。
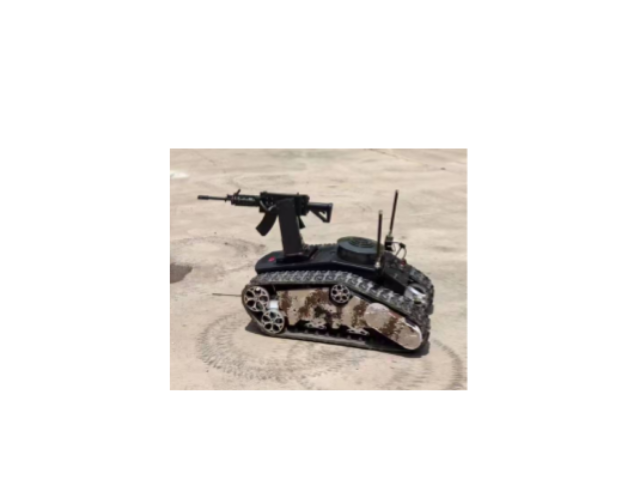
在非對稱作戰場景中,小型履帶式心戰機器人的戰術靈活性得到進一步凸顯。中國山蟻05機器人通過銷接式防脫履帶與雙流傳動技術,實現了每小時50公里的高速機動能力,可搭載外置暴閃致盲防暴燈與噪聲襲擾模塊執行心理突襲。在反恐行動中,該機器人可隱蔽接近暴恐分子據點,先以高頻聲波干擾其通訊設備,再通過突然啟動的強光爆閃使其短暫失明,利用內置機械臂投擲催淚瓦斯或非致命性橡膠彈。這種感官過載攻擊模式,配合其只11公斤的輕量化設計,使單兵可攜帶多臺機器人實施蜂群式心理戰。更值得關注的是,部分型號已集成AI語音克隆技術,可實時模擬敵方指揮官聲紋發布虛假命令,或用方言播報戰俘家屬求救信息,從認知層面瓦解敵方士氣。履帶式機器人在狹窄田埂可行,讓物資運輸機器在農田運輸更加自如。
履帶式全彩夜視巡防偵察機器人作為特種作業裝備的集大成者,其技術架構融合了多學科前沿成果。以無錫科義機器人研發的電力巡檢型號為例,其采用激光雷達與北斗RTK組合導航系統,通過SLAM算法實現厘米級定位精度,配合16組單獨金屬減震懸掛,可在30°斜坡、碎石路面及煤礦井下復雜底板穩定行駛。在夜視能力構建上,該機型搭載雙光云臺系統,集成500萬像素可見光攝像頭與紅外熱成像模塊,通過光學變倍技術實現18倍變焦,配合數字高清圖傳系統,可在5.8G頻段下實現1公里垂直傳輸距離。其重要優勢在于全彩夜視技術的突破——通過多光譜融合算法,將紅外熱輻射數據與低照度可見光圖像進行像素級匹配,在完全無光照環境下仍可輸出接近日間效果的彩色畫面,解決了傳統紅外成像只能顯示溫度梯度的局限性。這種技術特性使其在電力設備巡檢中能精確識別開關柜指示燈狀態、電纜接頭氧化痕跡等細微特征,在煤礦事故救援中可清晰分辨被困人員位置與瓦斯積聚區域。履帶式機器人在起伏不平的草地可行,讓物資運輸機器在草地順利運輸。江蘇履帶式心戰機器人價格
港口碼頭,履帶式物資運輸機器人裝卸和運輸貨物物資。江蘇大型全地形履帶式心戰機器人規格
履帶式救援機器人作為特種裝備領域的重要載體,其功能設計始終圍繞復雜災害場景的救援需求展開。在移動性能方面,其履帶式底盤通過仿生學設計模擬坦克與蛇類動物的復合運動模式,既能在瓦礫堆、泥濘地等松軟地形保持30kPa以上的接地壓力,又可通過差速轉向系統實現原地180度調頭,配合可調節的履帶張緊裝置,使機器人能攀爬45度斜坡并跨越0.8米寬的斷層。這種機動性使其在地震廢墟、山體滑坡等三維立體災害環境中,相比輪式或足式機器人具有更強的地形適應能力。其搭載的多模態感知系統集成了360度環視攝像頭、毫米波雷達、激光SLAM與熱成像儀,可穿透煙霧、粉塵等視覺障礙物,實時構建厘米級精度的三維環境模型。特別在夜間或地下空間救援時,熱成像模塊能通過溫差識別被困者體表0.5℃以上的溫度變化,結合AI目標識別算法,將人員定位準確率提升至92%以上。江蘇大型全地形履帶式心戰機器人規格
- 哈爾濱負重10KG中型單擺臂履帶排爆機器人 2025-12-17
- 負重10KG中型單擺臂履帶排爆機器人采購 2025-12-17
- 中型單擺臂履帶排爆機器人生產廠 2025-12-17
- 江蘇輪式物資運輸機器人現價 2025-12-17
- 履帶式排爆機器人供貨商 2025-12-17
- 中型單擺臂履帶排爆機器人生產 2025-12-17
- 江蘇中大型單擺臂履帶排爆機器人哪里有賣 2025-12-17
- 江蘇中大型單擺臂履帶排爆機器人供應公司 2025-12-17
- 江蘇負重20KG中大型單擺臂履帶排爆機器人 2025-12-17
- 特情救援機器人 2025-12-17
- 建鄴區會議管理系統是什么 2025-12-17
- 成都UL認證防火防盜保險箱排名 2025-12-17
- 工業園區一體化自動化組裝設備設備廠家 2025-12-17
- 河南工業安防設施建設 2025-12-17
- 浙江試驗智能設備生產廠家 2025-12-17
- 濱湖區全自動軸類量大從優 2025-12-17
- 海南雙箱自動液壓打包機品牌排行 2025-12-17
- 大型卷繞鍍膜機歡迎選購 2025-12-17
- 虎丘區好的擦拭紙均價 2025-12-17
- 武進區購買污泥干化設備規格尺寸 2025-12-17