-
 湖北多國(guó)標(biāo)兼容車(chē)輛輕便性試驗(yàn)設(shè)備廠(chǎng)家電話(huà)
湖北多國(guó)標(biāo)兼容車(chē)輛輕便性試驗(yàn)設(shè)備廠(chǎng)家電話(huà)車(chē)身姿態(tài)測(cè)試設(shè)備已成為現(xiàn)代汽車(chē)制造與維修領(lǐng)域不可或缺的技術(shù)支撐,其主要功能在于實(shí)時(shí)捕捉車(chē)輛在行駛過(guò)程中的整體運(yùn)動(dòng)狀態(tài)與姿態(tài)變化。這類(lèi)裝置通過(guò)集成高精度慣性測(cè)量單元、衛(wèi)星定位系統(tǒng)及多源傳感器融合算法,能夠連續(xù)采集車(chē)輛的速度、側(cè)傾角、俯仰角、航向角和加速度等關(guān)鍵動(dòng)...
2025-12-05 -
 安徽陀螺儀廠(chǎng)家聯(lián)系方式
安徽陀螺儀廠(chǎng)家聯(lián)系方式深耦合組合導(dǎo)航技術(shù)通過(guò)深度整合GNSS與慣性導(dǎo)航系統(tǒng)的底層數(shù)據(jù),實(shí)現(xiàn)了性能優(yōu)化的新高度。不同于只在位置層面融合結(jié)果的松耦合,深耦合直接處理GNSS接收機(jī)的偽距、載波相位等原始觀(guān)測(cè)值,并將慣性測(cè)量單元輸出的角速度和加速度作為濾波器輸入。這種架構(gòu)允許系統(tǒng)在衛(wèi)星信號(hào)...
2025-12-05 -
 四川半掛車(chē)側(cè)翻試驗(yàn)臺(tái)廠(chǎng)家聯(lián)系方式
四川半掛車(chē)側(cè)翻試驗(yàn)臺(tái)廠(chǎng)家聯(lián)系方式出口至歐美市場(chǎng)的商用車(chē)必須通過(guò)ECE、FMVSS等國(guó)際安全法規(guī)認(rèn)證,對(duì)測(cè)試數(shù)據(jù)的準(zhǔn)確性與可追溯性提出嚴(yán)格要求。武漢朗維科技車(chē)輛側(cè)翻試驗(yàn)臺(tái)具備0.1%F.S±1e的稱(chēng)重精度和0.1°的角度控制精度,測(cè)量結(jié)果穩(wěn)定可靠,符合國(guó)際計(jì)量標(biāo)準(zhǔn)。系統(tǒng)可自動(dòng)采集輪荷變化、平臺(tái)...
2025-12-05 -
山東自適應(yīng)GNSS定向價(jià)格
設(shè)備制造商的技術(shù)積累與產(chǎn)品實(shí)現(xiàn)能力直接影響組合導(dǎo)航系統(tǒng)的實(shí)際表現(xiàn)。具備自主研發(fā)能力的企業(yè)通常掌握關(guān)鍵算法,能夠針對(duì)特定應(yīng)用場(chǎng)景進(jìn)行深度優(yōu)化,而非依賴(lài)通用模塊集成。這類(lèi)廠(chǎng)商在算法穩(wěn)定性、抗干擾能力和環(huán)境適應(yīng)性方面具備長(zhǎng)期經(jīng)驗(yàn)積累,產(chǎn)品在復(fù)雜工況下表現(xiàn)出更強(qiáng)的可靠...
2025-12-04 -
西藏智能駕駛測(cè)距裝置批發(fā)
在大型土建工程或礦山開(kāi)采現(xiàn)場(chǎng),施工機(jī)械的作業(yè)精度直接關(guān)系到項(xiàng)目進(jìn)度與資源利用效率。工程組合導(dǎo)航系統(tǒng)融合衛(wèi)星定位與慣性測(cè)量技術(shù),為推土機(jī)、挖掘機(jī)和平地機(jī)等設(shè)備提供實(shí)時(shí)的位置與姿態(tài)信息。在城市建筑工地或露天礦區(qū)等復(fù)雜地形中,全球?qū)Ш叫l(wèi)星信號(hào)常因障礙物遮擋而出現(xiàn)中斷...
2025-12-04 -
 山西國(guó)產(chǎn)測(cè)距裝置
山西國(guó)產(chǎn)測(cè)距裝置隨著應(yīng)用需求的不斷演進(jìn),組合導(dǎo)航已發(fā)展出多種技術(shù)路徑以適配不同的場(chǎng)景。從數(shù)據(jù)融合層級(jí)來(lái)看,松耦合將各子系統(tǒng)單獨(dú)運(yùn)行的結(jié)果進(jìn)行融合,結(jié)構(gòu)清晰但精度有限;緊耦合則共享原始觀(guān)測(cè)數(shù)據(jù),如偽距和載波相位,明顯提升定位性能;深耦合進(jìn)一步打通GNSS接收機(jī)內(nèi)部環(huán)路,利用慣性...
2025-12-04 -
中國(guó)臺(tái)灣深耦合測(cè)速儀公司
工程級(jí)組合導(dǎo)航系統(tǒng)的集成過(guò)程需遵循嚴(yán)格的工藝規(guī)范,確保各組件協(xié)同工作。裝配前需核對(duì)全球?qū)Ш叫l(wèi)星接收機(jī)、天線(xiàn)、慣性測(cè)量單元等關(guān)鍵部件的型號(hào)與狀態(tài),確認(rèn)匹配性與完整性。天線(xiàn)安裝位置需經(jīng)過(guò)實(shí)地評(píng)估,避免金屬結(jié)構(gòu)遮擋并遠(yuǎn)離電磁干擾源,以保障信號(hào)接收質(zhì)量。慣性測(cè)量單元應(yīng)...
2025-12-04 -
 海南多國(guó)標(biāo)兼容車(chē)輛轉(zhuǎn)向盤(pán)角脈沖試驗(yàn)設(shè)備廠(chǎng)家有哪些
海南多國(guó)標(biāo)兼容車(chē)輛轉(zhuǎn)向盤(pán)角脈沖試驗(yàn)設(shè)備廠(chǎng)家有哪些車(chē)輛在彎道行駛時(shí)外側(cè)軌跡的延展范圍,是影響道路安全的關(guān)鍵因素之一,車(chē)身姿態(tài)測(cè)試設(shè)備為此提供了精確的量化手段。通過(guò)記錄車(chē)輛按法規(guī)要求轉(zhuǎn)向狀態(tài)下的運(yùn)動(dòng)軌跡,設(shè)備可精確算出外擺值,以此呈現(xiàn)車(chē)身外點(diǎn)在轉(zhuǎn)彎過(guò)程中達(dá)到的偏移距離峰值。這一參數(shù)對(duì)于大型客車(chē)和貨車(chē)尤為重要,直...
2025-12-04 -
 安徽多國(guó)標(biāo)兼容整車(chē)動(dòng)力性能檢測(cè)設(shè)備廠(chǎng)家
安徽多國(guó)標(biāo)兼容整車(chē)動(dòng)力性能檢測(cè)設(shè)備廠(chǎng)家多項(xiàng)國(guó)標(biāo)兼容的車(chē)身姿態(tài)測(cè)試設(shè)備的出現(xiàn),回應(yīng)了國(guó)內(nèi)汽車(chē)產(chǎn)業(yè)細(xì)分場(chǎng)景下的標(biāo)準(zhǔn)化適配需求。此類(lèi)系統(tǒng)通過(guò)內(nèi)置多套我國(guó)不同品類(lèi)、不同場(chǎng)景的標(biāo)準(zhǔn)算法模型,可在同一操作界面下靈活切換執(zhí)行各類(lèi)國(guó)標(biāo)要求,覆蓋乘用車(chē)、商用車(chē)及專(zhuān)項(xiàng)作業(yè)車(chē)等多領(lǐng)域的檢測(cè)規(guī)范。例如針對(duì)乘用車(chē)的GB/T...
2025-12-04 -
安徽農(nóng)機(jī)測(cè)距裝置品牌
隨著應(yīng)用需求的不斷演進(jìn),組合導(dǎo)航已發(fā)展出多種技術(shù)路徑以適配不同的場(chǎng)景。從數(shù)據(jù)融合層級(jí)來(lái)看,松耦合將各子系統(tǒng)單獨(dú)運(yùn)行的結(jié)果進(jìn)行融合,結(jié)構(gòu)清晰但精度有限;緊耦合則共享原始觀(guān)測(cè)數(shù)據(jù),如偽距和載波相位,明顯提升定位性能;深耦合進(jìn)一步打通GNSS接收機(jī)內(nèi)部環(huán)路,利用慣性...
2025-12-04 -
湖北農(nóng)機(jī)衛(wèi)星定位系統(tǒng)采購(gòu)
當(dāng)前市場(chǎng)上組合導(dǎo)航產(chǎn)品呈現(xiàn)出多樣化的形態(tài)與應(yīng)用定位,以滿(mǎn)足不同行業(yè)的需求。高配置產(chǎn)品配備高性能MEMS或光纖級(jí)慣性測(cè)量單元,結(jié)合多頻多系統(tǒng)GNSS接收能力,可實(shí)現(xiàn)厘米級(jí)定位精度,普遍應(yīng)用于測(cè)繪、精準(zhǔn)農(nóng)業(yè)和地質(zhì)勘探等對(duì)精度要求嚴(yán)苛的領(lǐng)域。中端產(chǎn)品在性能與成本之間...
2025-12-04 -
 陜西汽車(chē)橫向單車(chē)道變換試驗(yàn)設(shè)備有哪些品牌
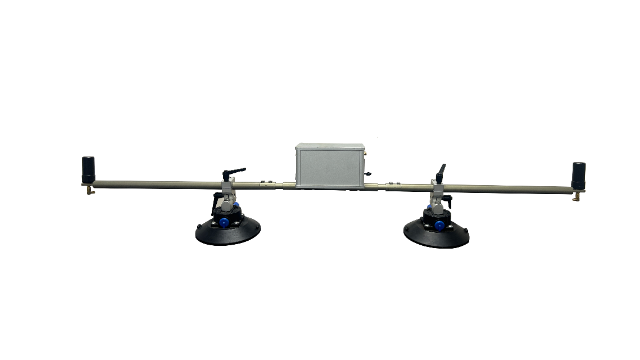
陜西汽車(chē)橫向單車(chē)道變換試驗(yàn)設(shè)備有哪些品牌通過(guò)磁性底座或真空吸附裝置的車(chē)身姿態(tài)測(cè)試設(shè)備,可快速固定于車(chē)身金屬表面或車(chē)窗玻璃,適應(yīng)多種車(chē)型,包括乘用車(chē)、商用車(chē)及掛車(chē)組合。設(shè)備啟動(dòng)后自動(dòng)進(jìn)行初始姿態(tài)校準(zhǔn),確保測(cè)量坐標(biāo)系與車(chē)輛基準(zhǔn)一致。切換測(cè)試對(duì)象時(shí),只需將設(shè)備轉(zhuǎn)移至目標(biāo)車(chē)輛并重新固定,即可開(kāi)始新一輪測(cè)試,...
2025-12-04 -
 黑龍江車(chē)輛轉(zhuǎn)向盤(pán)回正試驗(yàn)設(shè)備廠(chǎng)家有哪些
黑龍江車(chē)輛轉(zhuǎn)向盤(pán)回正試驗(yàn)設(shè)備廠(chǎng)家有哪些針對(duì)汽車(chē)零部件企業(yè)的系統(tǒng)匹配驗(yàn)證需求,車(chē)身姿態(tài)測(cè)試設(shè)備可用于轉(zhuǎn)向系統(tǒng)、懸架系統(tǒng)等關(guān)鍵部件的實(shí)車(chē)性能評(píng)估。在不改變車(chē)輛原結(jié)構(gòu)的前提下,企業(yè)可將新開(kāi)發(fā)的轉(zhuǎn)向器或懸掛總成裝車(chē)后進(jìn)行道路測(cè)試,通過(guò)設(shè)備采集的航向角、側(cè)傾角與軌跡數(shù)據(jù),分析部件對(duì)整車(chē)通過(guò)性與姿態(tài)穩(wěn)定性的影...
2025-12-04 -
 甘肅農(nóng)機(jī)測(cè)速裝置報(bào)價(jià)
甘肅農(nóng)機(jī)測(cè)速裝置報(bào)價(jià)在現(xiàn)代工業(yè)應(yīng)用中,現(xiàn)場(chǎng)設(shè)備的維護(hù)和升級(jí)往往面臨諸多挑戰(zhàn),尤其是對(duì)于分布較廣的工程機(jī)械和車(chē)載系統(tǒng),頻繁的現(xiàn)場(chǎng)調(diào)試和固件更新會(huì)大幅增加運(yùn)營(yíng)成本。武漢朗維科技有限公司研發(fā)的組合導(dǎo)航設(shè)備支持CAN接口遠(yuǎn)程升級(jí)功能,用戶(hù)無(wú)需前往現(xiàn)場(chǎng)即可通過(guò)通用工具對(duì)板卡進(jìn)行在線(xiàn)更新。這...
2025-12-04 -
 中國(guó)香港自適應(yīng)定位軟件廠(chǎng)家聯(lián)系方式
中國(guó)香港自適應(yīng)定位軟件廠(chǎng)家聯(lián)系方式在精密制造環(huán)境中,組合導(dǎo)航系統(tǒng)的裝配過(guò)程體現(xiàn)了高度的專(zhuān)業(yè)性和嚴(yán)謹(jǐn)性。高精度GNSS接收機(jī)與慣性測(cè)量單元被精確安裝,并建立穩(wěn)定的數(shù)據(jù)通道,確保各模塊間無(wú)縫協(xié)作。隨后,輔助傳感器如里程計(jì)和氣壓計(jì)等依次接入系統(tǒng),所有信號(hào)線(xiàn)路均按照嚴(yán)格規(guī)范進(jìn)行連接,避免任何可能的干擾...
2025-12-04 -
國(guó)產(chǎn)汽車(chē)最小轉(zhuǎn)彎通道圓直徑測(cè)試設(shè)備有哪些品牌
憑借模塊化的架構(gòu)設(shè)計(jì),測(cè)試設(shè)備對(duì)多樣化車(chē)型的適配能力得到明顯增強(qiáng)。系統(tǒng)將傳感器單元、信號(hào)處理模塊和數(shù)據(jù)分析功能解耦為單獨(dú)組件,可根據(jù)不同車(chē)輛的軸距、輪距和車(chē)身高度進(jìn)行靈活組合與參數(shù)調(diào)整。這種設(shè)計(jì)避免了為每種車(chē)型配置特定設(shè)備的需求,一套系統(tǒng)即可覆蓋從緊湊型車(chē)到大...
2025-12-04 -
重慶多國(guó)標(biāo)兼容車(chē)輛底盤(pán)調(diào)校設(shè)備
營(yíng)運(yùn)車(chē)輛投入運(yùn)營(yíng)前的安全檢測(cè)是保障道路通行安全的重要環(huán)節(jié),車(chē)身姿態(tài)測(cè)試在其中發(fā)揮著基礎(chǔ)性作用。測(cè)試內(nèi)容涵蓋外擺值、最小轉(zhuǎn)彎直徑及直角彎道通過(guò)性等項(xiàng)目,這些參數(shù)直接關(guān)聯(lián)車(chē)輛在實(shí)際道路環(huán)境中的行駛邊界與操控能力。外擺值反映車(chē)輛轉(zhuǎn)彎時(shí)外側(cè)邊緣極限位置的空間占用,避免...
2025-12-04 -
吉林多國(guó)標(biāo)兼容整車(chē)動(dòng)力性能檢測(cè)設(shè)備廠(chǎng)家有哪些
外擺值作為車(chē)輛轉(zhuǎn)向安全性的關(guān)鍵指標(biāo),其超標(biāo)問(wèn)題的高效排查對(duì)縮短開(kāi)發(fā)周期至關(guān)重要。傳統(tǒng)排查方式依賴(lài)經(jīng)驗(yàn)試錯(cuò),耗時(shí)且難以精確定位根源。現(xiàn)代方法則結(jié)合設(shè)計(jì)模型、仿真分析與實(shí)測(cè)驗(yàn)證,形成系統(tǒng)化診斷路徑。利用CAD模型可快速評(píng)估軸距、前懸長(zhǎng)度、轉(zhuǎn)向梯形幾何等結(jié)構(gòu)參數(shù)對(duì)外...
2025-12-04 -
 湖南數(shù)字化施工GNSS定位采購(gòu)
湖南數(shù)字化施工GNSS定位采購(gòu)組合導(dǎo)航系統(tǒng)為移動(dòng)平臺(tái)提供多樣化功能,適應(yīng)不同場(chǎng)景的技術(shù)需求。實(shí)時(shí)定位功能輸出高精度位置信息,結(jié)合實(shí)時(shí)動(dòng)態(tài)差分技術(shù)達(dá)到厘米級(jí)水平,適用于精確作業(yè)場(chǎng)景。姿態(tài)解算模塊實(shí)時(shí)計(jì)算航向角、俯仰角和橫滾角,為無(wú)人機(jī)飛行控制或車(chē)輛穩(wěn)定性管理提供關(guān)鍵數(shù)據(jù)。軌跡重建能力記錄歷史...
2025-12-04 -
 福建多國(guó)標(biāo)兼容車(chē)輛轉(zhuǎn)向扭矩測(cè)量廠(chǎng)家電話(huà)
福建多國(guó)標(biāo)兼容車(chē)輛轉(zhuǎn)向扭矩測(cè)量廠(chǎng)家電話(huà)轉(zhuǎn)向系統(tǒng)作為車(chē)輛操控的關(guān)鍵部件,其工作狀態(tài)直接影響駕駛安全與響應(yīng)精度,車(chē)身姿態(tài)測(cè)試設(shè)備為該系統(tǒng)的性能驗(yàn)證提供了有效途徑。系統(tǒng)在測(cè)試中采集轉(zhuǎn)向過(guò)程中的力矩變化、轉(zhuǎn)角響應(yīng)速度及回正能力等動(dòng)態(tài)參數(shù),多方位評(píng)估轉(zhuǎn)向機(jī)構(gòu)的功能完整性。測(cè)試可識(shí)別助力系統(tǒng)衰減、傳動(dòng)間隙增大...
2025-12-04 -
 安徽工程測(cè)速儀生產(chǎn)廠(chǎng)家
安徽工程測(cè)速儀生產(chǎn)廠(chǎng)家在智能駕駛應(yīng)用中,組合導(dǎo)航系統(tǒng)發(fā)揮著關(guān)鍵的感知支撐作用。其高精度定位能力滿(mǎn)足自動(dòng)駕駛對(duì)車(chē)道級(jí)位置信息的需求,為路徑規(guī)劃、變道決策和精確停靠提供可靠依據(jù)。在隧道、立交橋、地下車(chē)庫(kù)等全球?qū)Ш叫l(wèi)星信號(hào)受限區(qū)域,系統(tǒng)通過(guò)融合慣性測(cè)量單元及其他傳感器數(shù)據(jù),維持連續(xù)定位輸...
2025-12-04 -
內(nèi)蒙古無(wú)人機(jī)RTK定位采購(gòu)
在電磁環(huán)境復(fù)雜的區(qū)域維持定位穩(wěn)定性,是組合導(dǎo)航系統(tǒng)的一項(xiàng)關(guān)鍵能力。為應(yīng)對(duì)各類(lèi)干擾源,系統(tǒng)采用多種技術(shù)手段協(xié)同提升抗干擾性能。多頻點(diǎn)全球?qū)Ш叫l(wèi)星接收機(jī)可同時(shí)接收多個(gè)頻段信號(hào),以防單頻干擾導(dǎo)致的信號(hào)失鎖。自適應(yīng)天線(xiàn)陣列通過(guò)波束成形技術(shù),主動(dòng)抑制來(lái)自特定方向的干擾信...
2025-12-04 -
 天津車(chē)輛側(cè)翻試驗(yàn)臺(tái)廠(chǎng)家有哪些
天津車(chē)輛側(cè)翻試驗(yàn)臺(tái)廠(chǎng)家有哪些高校與科研單位利用車(chē)輛側(cè)翻試驗(yàn)臺(tái)開(kāi)展車(chē)輛動(dòng)力學(xué)基礎(chǔ)研究,探索穩(wěn)定性控制的新方法。研究人員借助該設(shè)備驗(yàn)證理論模型的準(zhǔn)確性,分析不同設(shè)計(jì)變量對(duì)側(cè)翻閾值的影響規(guī)律。武漢朗維科技有限公司深耕汽車(chē)測(cè)試系統(tǒng)研發(fā)領(lǐng)域,其設(shè)備通過(guò)ISO 9001認(rèn)證的質(zhì)量管理體系,為高精度傳...
2025-12-04 -
陜西多國(guó)標(biāo)兼容汽車(chē)外擺值測(cè)量多少錢(qián)
在整車(chē)開(kāi)發(fā)驗(yàn)證階段,主機(jī)廠(chǎng)需要對(duì)新車(chē)型的通過(guò)性與動(dòng)態(tài)姿態(tài)進(jìn)行多輪評(píng)估,車(chē)身姿態(tài)測(cè)試設(shè)備為此類(lèi)研發(fā)試驗(yàn)提供了可重復(fù)、高精度的數(shù)據(jù)支持。工程師可在試制樣車(chē)上快速安裝設(shè)備,完成最小轉(zhuǎn)彎直徑與外擺值的實(shí)車(chē)驗(yàn)證,將實(shí)測(cè)數(shù)據(jù)與設(shè)計(jì)參數(shù)對(duì)比,判斷底盤(pán)布置是否滿(mǎn)足預(yù)期。設(shè)備不...
2025-12-04 -
中國(guó)香港車(chē)輛轉(zhuǎn)向角度測(cè)量有哪些品牌
虛擬仿真技術(shù)在汽車(chē)研發(fā)中的應(yīng)用日益深入,其準(zhǔn)確性高度依賴(lài)于實(shí)車(chē)測(cè)試數(shù)據(jù)的支撐。技術(shù)人員通過(guò)在多種實(shí)際路況下采集車(chē)輛的動(dòng)態(tài)響應(yīng),如轉(zhuǎn)向輸入、車(chē)身姿態(tài)變化和輪跡軌跡,能夠?yàn)榉抡婺P吞峁┱鎸?shí)可靠的邊界條件與參數(shù)依據(jù)。這些實(shí)測(cè)數(shù)據(jù)用于調(diào)整模型中的懸掛剛度、輪胎特性及質(zhì)...
2025-12-04 -
寧夏工程衛(wèi)星定位系統(tǒng)生產(chǎn)廠(chǎng)家
多頻點(diǎn)全球?qū)Ш叫l(wèi)星系統(tǒng)技術(shù)的應(yīng)用明顯提升了組合導(dǎo)航系統(tǒng)的定位性能。系統(tǒng)能夠同步接收多個(gè)頻段的衛(wèi)星信號(hào),利用不同頻率信號(hào)在電離層中傳播速度的差異,建立誤差模型并有效消除電離層延遲,從而提高定位精度。這種多頻觀(guān)測(cè)能力增強(qiáng)了系統(tǒng)對(duì)電磁干擾的抵抗能力,在城市密集區(qū)域或...
2025-12-04 -
江蘇無(wú)人機(jī)定位系統(tǒng)報(bào)價(jià)
實(shí)現(xiàn)高精度定位依賴(lài)于組合導(dǎo)航系統(tǒng)中多個(gè)環(huán)節(jié)的協(xié)同優(yōu)化與技術(shù)整合。系統(tǒng)前端配備支持全頻段的全球?qū)Ш叫l(wèi)星接收機(jī)與高穩(wěn)定性慣性測(cè)量單元,確保原始數(shù)據(jù)的質(zhì)量與可靠性。實(shí)時(shí)動(dòng)態(tài)差分技術(shù)通過(guò)差分處理消除電離層延遲、軌道誤差等共性偏差,將全球?qū)Ш叫l(wèi)星定位精度提升至厘米級(jí)。慣...
2025-12-03 -
 福建冷藏車(chē)機(jī)械性能測(cè)試設(shè)備怎么選
福建冷藏車(chē)機(jī)械性能測(cè)試設(shè)備怎么選冷藏車(chē)試驗(yàn)過(guò)程中產(chǎn)生的數(shù)據(jù)需要按需記錄以便后續(xù)分析,武漢朗維的冷藏車(chē)測(cè)試設(shè)備允許用戶(hù)對(duì)采樣頻率與存儲(chǔ)間隔進(jìn)行靈活配置。在穩(wěn)定狀態(tài)下,系統(tǒng)可根據(jù)設(shè)定的時(shí)間周期自動(dòng)保存數(shù)據(jù)組,間隔時(shí)間可根據(jù)試驗(yàn)要求自由調(diào)整。采樣頻率決定了溫度、功率、壓差等參數(shù)的記錄密度,高頻采集...
2025-12-03 -
山東農(nóng)機(jī)測(cè)速裝置品牌
實(shí)現(xiàn)L3級(jí)以上自動(dòng)駕駛的關(guān)鍵在于系統(tǒng)能否持續(xù)輸出INS_RTKFIXED狀態(tài),即在慣性輔助下的固定解定位模式。這不僅要求厘米級(jí)精度,更強(qiáng)調(diào)結(jié)果的連續(xù)性與可信度。武漢朗維科技有限公司研發(fā)的組合導(dǎo)航設(shè)備內(nèi)置高精度GNSS測(cè)量引擎,支持全系統(tǒng)多頻點(diǎn)信號(hào)接收,配合網(wǎng)絡(luò)...
2025-12-03 -
內(nèi)蒙古雙天線(xiàn)GNSS定向批發(fā)
組合導(dǎo)航系統(tǒng)通過(guò)整合多種傳感器實(shí)現(xiàn)連續(xù)高精度定位。全球?qū)Ш叫l(wèi)星接收機(jī)提供精確定位基準(zhǔn),慣性測(cè)量單元以高更新率輸出角速度和加速度,反映載體的相對(duì)運(yùn)動(dòng)狀態(tài)。在衛(wèi)星信號(hào)良好的環(huán)境中,系統(tǒng)主要依賴(lài)觀(guān)測(cè)值進(jìn)行定位;當(dāng)信號(hào)因遮擋或干擾減弱時(shí),系統(tǒng)自動(dòng)提升慣性測(cè)量單元數(shù)據(jù)的...
2025-12-03