上海智能化圖像標注技術
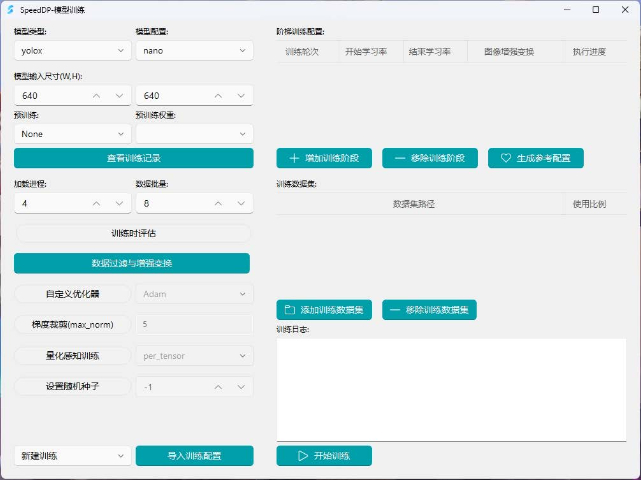
AI算法的開發訓練,依賴于大量的數據標注,按照傳統方法,需要人工手動拉框,整個過程費時費力,明顯不符合現在的教學理念。為了應對這樣的需求,成都慧視推出了一個針對于零基礎AI從業人員的算法開發平臺SpeedDP。SpeedDP是一個針對AI零基礎用戶的低門檻算法開發平臺,提供從數據標注、模型訓練、測試驗證到RockChip嵌入式硬件平臺模型部署的可視化AI開發功能。平臺提供豐富的算法參數設置接口,滿足不同用戶業務場景的定制化需求。SpeedDP的模型生成模式是從零開始訓練。上海智能化圖像標注技術
SmartDP針對數據稀缺或需要快速部署的場景進行了特殊優化,其主要優勢在于無需大量數據和高強度訓練即可生成高質量模型。·高效模板生成機制:基于YOLOE架構進行深度優化,通過少量樣本即可生成高性能模型模板。這種機制避免了傳統訓練過程中的大量計算和時間消耗,顯著提高了模型開發效率。簡化工作流程:SmartDP極大地簡化了從模型生成到部署的整個流程。用戶無需擔心數據收集、標注和長時間訓練等問題,只需提供少量樣本即可快速獲得可用模型。硬件優化:針對瑞芯微RK3588平臺進行了深度優化,確保了在該平臺上的高性能表現。雖然支持的硬件平臺范圍相對集中,但在目標平臺上的性能表現突出。 浙江專業圖像標注應用SpeedDP需要大批量標注數據集。
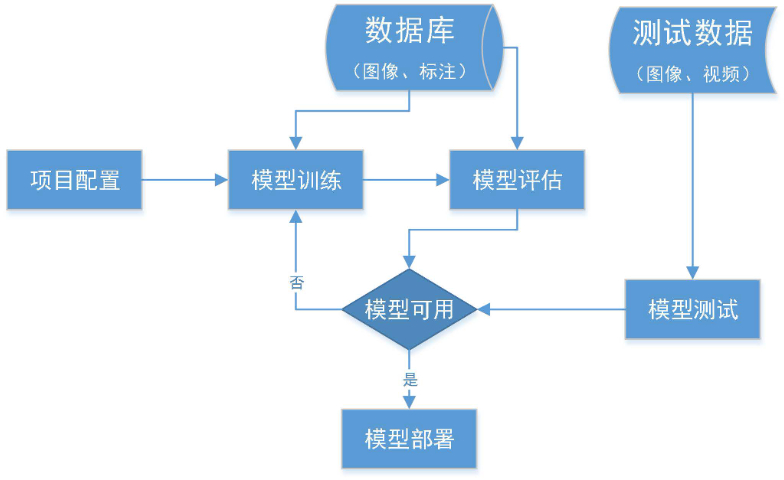
慧視speeddp平臺提供豐富的算法參數設置接口,滿足不同用戶業務場景的定制化需求。平臺具備基礎的數據采集、模型訓練和模型測試評估等一系列功能,針對于不同的目標,不同的場景,只要打造特定的模型,經過大量的訓練,讓AI認識學習不斷進步,就能夠利用這個模型對新采集的數據集進行快速的自動標注,幫助圖像算法工程師節約大量的圖像標注的時間。經過測試,SpeedDP標注的效率是人工的一千倍,這在海量的數據處理時,顯現出巨大優勢。
無人機在農業領域能夠實現高效率的施肥、播種等操作。但是不同的作業環境對于無人機的工作性能要求不一樣,同樣的方案在平原地區適用,在高原地區就不行。因此針對于特殊作業環境需要制定不同的智慧化方案。像青藏高原這樣地貌復雜、低氣壓、大溫差的特點,參與智能化工作的各個部件需要符合這樣作業環境特點的性能要求。不比平原的一馬平川,高原由于環境復雜,地形起伏對于無人機的飛行也需要進行控制,無論是高度還是速度甚至距離都需要進行嚴格限制,防止出現撞機等事故。因此,這個方面的智慧化建設就需要無人機具備智能避障的功能,無人機需要在高速度或者遠距離的情況下識別樹木、電線桿、石頭等障礙物,并能夠實現避障。如何進行快速的數據標注?

面對這些圖像標注的難題,可以通過引入自動化標注工具來解決!隨著當下人工智能的高速發展,應用領域日益增加,圖像標注工作自動化已成為必由之路,類似慧視光電SpeedDP這樣的標注整體工具會日益增多,同時針對行業的專業標注工具也會層出不窮,逐漸把技術人員的主要精力解放出來,從事價值更高的工作。SpeedDP作為一個AI算法開發平臺,既能夠在既有算法的基礎上對新數據集進行快速自動標注,也能夠通過新數據集的標注打造專屬算法。SmartDP適用于無數據集、需要快速部署的場景。廣西國產化圖像標注大概價格
SpeedDP支持量化感知訓練。上海智能化圖像標注技術
eVTOL是指電動垂直起降飛行器,大力開展eVTOL試點,是對低空經濟的強動力注入,而無人機正是這一領域的關鍵選擇之一。無人機在低空經濟中扮演者重要角色,隨著應用領域的不斷增多,未來無人機的數量將呈式增長,屆時eVTOL起降中心將聚集眾多各式各樣的無人機,如何高效有序的讓無人機彼此工作而不互相干擾是行業值得思考的一件事。當許多無人機需要同時起飛執行不同的任務時,如果操控不當,或者收到外力影響,就容易出現事故,而人為的反應畢竟有延后,不可能做到完全的補救操作,因此無人機自身的規避措施建設一樣重要。上海智能化圖像標注技術
- 山西視頻識別AI智能人臉識別 2026-06-11
- 四川開放AI智能技術 2026-06-11
- 安徽智能圖像識別模塊目標檢測 2026-06-11
- 福建快速圖像標注多少錢 2026-06-11
- 云南圖形圖像識別模塊算法 2026-06-11
- 黑龍江省時省力圖像標注多少錢 2026-06-11
- 四川信息化圖像標注哪里買 2026-06-11
- 浙江專業圖像標注大概價格 2026-06-11
- 廣東省時省力圖像標注優勢 2026-06-11
- 江西哪里有圖像標注優勢 2026-06-11
- 寶山區進口智慧大廳供應商 2026-06-11
- 湖北通信覆蓋工程廠家電話 2026-06-11
- 安徽智能圖像識別模塊目標檢測 2026-06-11
- 汕頭高壽命汽車電子測試工具 2026-06-11
- 浦東新區本地AI驅動汽車設計平臺銷售廠家 2026-06-11
- 襄陽智慧環衛系統標準 2026-06-11
- 江蘇圖片分布式存儲應用 2026-06-11
- 吳中區統一并聯蜘蛛手生產企業 2026-06-11
- 湖南實時到賬商家轉賬到零錢辦理費用 2026-06-11
- 蘇州統一AGV智能搬運小車生產企業 2026-06-11