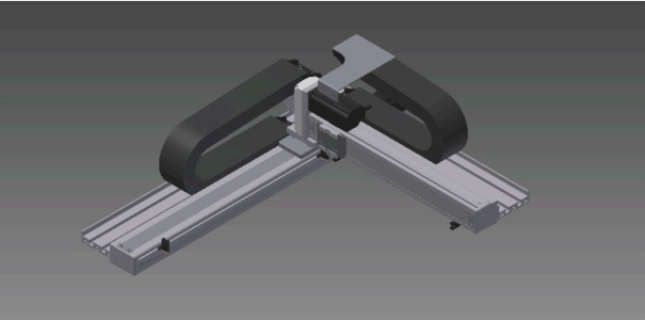
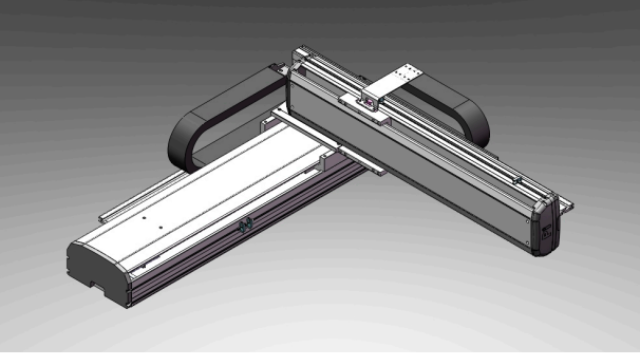
上海懸臂型輕負載直交機械手模組
直交機械手的精度控制技術精度是直交機械手的關鍵性能指標之一。為實現高精度控制,一方面在機械結構上采用高精度的滾珠絲桿、直線導軌等部件,并嚴格控制加工精度和裝配精度,減少機械間隙帶來的誤差。另一方面,在控制系統中運用先進的算法和傳感器技術。例如,通過高精度的編碼器實時監測電機的旋轉角度,進而精確計算機械手的位置,當檢測到位置偏差時,控制系統迅速做出調整,確保機械手始終按照預設軌跡運動。此外,還可采用誤差補償技術,對機械結構的固有誤差以及運行過程中因溫度變化、負載變化等因素產生的誤差進行補償,從而進一步提高直交機械手的定位精度,滿足對精度要求極高的應用場景,如精密儀器制造、生物醫療設備生產等。 塑膠行業中,直交機械手助力成型,提高生產,產品多樣!上海懸臂型輕負載直交機械手模組
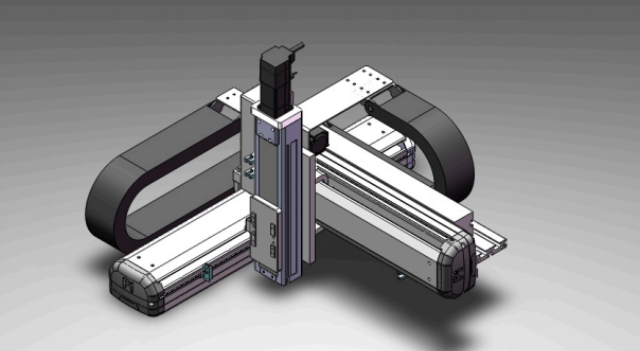
直交機械手的基本原理:直交機械手作為工業自動化的關鍵設備,其工作原理基于直角坐標系。通過X、Y、Z軸的單獨運動組合,實現準確的三維空間定位。以常見的螺桿型直交機械手為例,它主要由螺桿傳動系統、導軌、控制系統與執行機構構成。螺桿傳動系統利用螺桿和螺母的配合,將電機的旋轉運動轉化為直線運動,以此驅動機械手沿水平或垂直方向平穩移動。導軌則為機械手的運動提供穩定支撐與導向,保證運動的精度和直線度。控制系統如同機械手的“大腦”,精確調控各軸的運動軌跡、速度及加速度,從而實現對工件的精確抓取、搬運與放置等操作。這種基于直角坐標的運動方式,使直交機械手能夠在復雜的工業環境中高效、準確地完成各類任務。 陜西自動化直交機械手工廠打磨作業時,直交機械手平穩打磨,表面光滑,工藝精湛!
直交機械手在食品包裝行業的應用優勢:食品包裝行業對生產設備的衛生標準、運行效率以及包裝精度有著嚴格要求,直交機械手恰好能完美契合這些需求。在食品包裝過程中,直交機械手能夠快速、準確地抓取食品,將其放入包裝容器內,實現高效的物料填充。其準確的定位能力確保了食品在包裝容器內的放置位置準確無誤,有助于提升包裝的美觀度與規范性。同時,直交機械手采用符合食品衛生標準的材料制造,表面光滑易清潔,有效避免了食品受到污染的風險。此外,機械手能夠與各類包裝設備無縫銜接,實現自動化的包裝流程,極大地提高了食品包裝行業的生產效率,降低了生產成本,滿足了市場對食品包裝快速、高效、衛生的需求。
直交機械手與工業的融合發展:工業強調智能制造和數字化轉型,直交機械手在這一發展浪潮中扮演著關鍵角色,與工業理念深度融合。通過物聯網技術,直交機械手可以實時連接到生產網絡中,實現設備之間的數據共享和互聯互通。其運行狀態、工作參數、故障信息等都能實時傳輸到生產管理系統,便于管理人員進行遠程監控和故障診斷,提高設備的維護效率和生產的穩定性。同時,借助大數據分析和云計算技術,對機械手的運行數據進行深入分析,優化運動軌跡和生產流程,實現生產過程的智能化優化。此外,直交機械手與其他智能設備協同工作,構建起高度自動化、智能化的生產系統,推動工業生產向智能化、柔性化方向邁進,助力企業在工業時代提升競爭力。 可將直交機械手視為執行單元,靈活搭配,方便實用!
直交機械手的發展趨勢與創新方向:隨著科技的不斷進步,直交機械手正朝著智能化、輕量化、高速化與高精度化的方向發展。在智能化方面,引入人工智能技術,使機械手能夠根據生產環境的變化自動調整運動策略,實現自主決策與智能操作。輕量化設計則通過采用新型強度高、低密度材料,在保證機械結構剛性的前提下,降低機械手的整體重量,提高其運動靈活性與能源利用效率。高速化與高精度化的發展趨勢,要求不斷優化驅動系統與控制算法,提升電機的響應速度與定位精度,滿足日益增長的高效、精密生產需求。此外,模塊化設計也是未來的創新方向之一,通過將機械手的各個功能模塊進行標準化設計,方便用戶根據實際需求進行靈活組合與定制,進一步拓展直交機械手的應用領域。 保證直交機械手手臂正確方向,抵抗彎曲和扭轉力矩,堅固耐用!重慶皮帶型直交機械手模組
性價比高的直坐標機械手,造價低于同等負重關節機器人!上海懸臂型輕負載直交機械手模組
直交機械手的驅動與控制系統:驅動系統堪稱直交機械手的“動力心臟”,常見的驅動方式包括電機驅動與氣動驅動。電機驅動中,伺服電機憑借其準確的轉速與位置控制能力,成為主流選擇,能夠使機械手實現微米級別的定位精度,滿足精密裝配、電子加工等行業的高要求。氣動驅動則以其響應速度快、成本較低的特點,在一些對精度要求相對不高、但追求快速動作的場合得到應用,如物料搬運的初級階段。控制系統則像是機械手的“大腦”,通過編寫特定的程序,能夠精確控制驅動系統的運行,協調各軸的運動,實現復雜的動作組合與任務流程。同時,先進的控制系統還具備故障診斷、參數調整等功能,方便操作人員進行設備維護與優化。 上海懸臂型輕負載直交機械手模組
- 北京過濾除菌五恒系統和空調的區別 2025-12-19
- 浙江靜音空壓機廠商 2025-12-19
- 江蘇薄膜熱熔膠復合機采購平臺 2025-12-19
- 金華燃氣控制閥維修便宜 2025-12-19
- 安徽輕型氣脹軸費用 2025-12-19
- 崇明區便宜的消防材料檢測哪家強 2025-12-19
- 上海測試實驗臺 2025-12-19
- 廣元真空鍍膜設備哪家好 2025-12-19
- 南京工具磨床廠家報價 2025-12-19
- 河北高轉速齒輪泵推薦廠家 2025-12-19