-
 西藏?cái)?shù)字化施工RTK定位品牌
西藏?cái)?shù)字化施工RTK定位品牌高精度組合導(dǎo)航系統(tǒng)在實(shí)際應(yīng)用中展現(xiàn)出穩(wěn)定的綜合性能。系統(tǒng)集成高精度測量與導(dǎo)航引擎,支持實(shí)時(shí)動(dòng)態(tài)差分解算,可在開闊區(qū)域?qū)崿F(xiàn)厘米級(jí)水平定位精度與亞米級(jí)垂直精度。在城市高樓區(qū)、立交橋下等信號(hào)受限場景中,依托深耦合算法與高性能慣性測量單元,系統(tǒng)仍能保持亞米級(jí)定位能力,...
2025-12-18 -
 山東深耦合組合慣導(dǎo)價(jià)格
山東深耦合組合慣導(dǎo)價(jià)格工程級(jí)組合導(dǎo)航系統(tǒng)的集成過程需遵循嚴(yán)格的工藝規(guī)范,確保各組件協(xié)同工作。裝配前需核對(duì)全球?qū)Ш叫l(wèi)星接收機(jī)、天線、慣性測量單元等關(guān)鍵部件的型號(hào)與狀態(tài),確認(rèn)匹配性與完整性。天線安裝位置需經(jīng)過實(shí)地評(píng)估,避免金屬結(jié)構(gòu)遮擋并遠(yuǎn)離電磁干擾源,以保障信號(hào)接收質(zhì)量。慣性測量單元應(yīng)...
2025-12-18 -
 北京車輛性能檢測設(shè)備
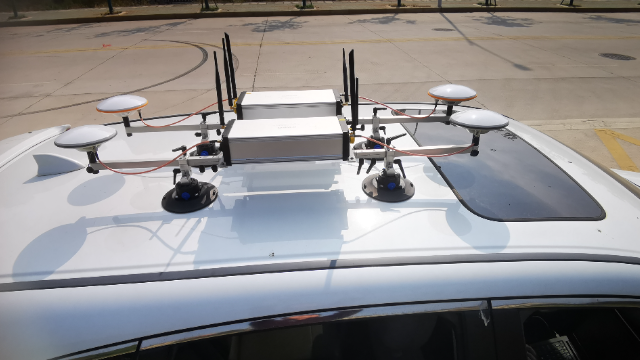
北京車輛性能檢測設(shè)備車身姿態(tài)測試設(shè)備的技術(shù)實(shí)現(xiàn)根植于車輛運(yùn)動(dòng)過程中空間狀態(tài)的精確捕捉與還原。該設(shè)備通過同步采集GNSS提供的全局定位信息與慣性測量單元記錄的角速度和加速度數(shù)據(jù),構(gòu)建車輛在三維空間中的完整運(yùn)動(dòng)模型。在轉(zhuǎn)彎或變道過程中,系統(tǒng)依據(jù)剛體運(yùn)動(dòng)學(xué)原理,將車輛視為統(tǒng)一運(yùn)動(dòng)體,結(jié)...
2025-12-18 -
甘肅深耦合衛(wèi)星定位系統(tǒng)公司
多路徑效應(yīng)對(duì)GNSS定位精度的影響明顯,尤其在城市或建筑密集區(qū)域,這種誤差源尤為突出。為了抑制多路徑效應(yīng),組合導(dǎo)航系統(tǒng)采用了多種先進(jìn)技術(shù)。先進(jìn)的信號(hào)處理算法,如多相關(guān)器與自適應(yīng)濾波技術(shù),能夠區(qū)分直達(dá)信號(hào)與反射信號(hào),降低多路徑引入的偽距偏差。采用具有低多路徑敏感...
2025-12-18 -
河北自適應(yīng)定位系統(tǒng)批發(fā)
在城市高樓林立或地下隧道等衛(wèi)星信號(hào)難以覆蓋的區(qū)域,定位系統(tǒng)面臨連續(xù)性挑戰(zhàn),組合導(dǎo)航通過融合全球?qū)Ш叫l(wèi)星系統(tǒng)、慣性測量單元與里程計(jì)等多源傳感器數(shù)據(jù),提供有效解決方案。全球?qū)Ш叫l(wèi)星系統(tǒng)提供長期穩(wěn)定的精確定位參考,慣性測量單元在信號(hào)中斷期間基于前一時(shí)刻的狀態(tài)推算載體...
2025-12-17 -
 山東車輛滑行測試設(shè)備采購
山東車輛滑行測試設(shè)備采購在整車開發(fā)驗(yàn)證階段,主機(jī)廠需要對(duì)新車型的通過性與動(dòng)態(tài)姿態(tài)進(jìn)行多輪評(píng)估,車身姿態(tài)測試設(shè)備為此類研發(fā)試驗(yàn)提供了可重復(fù)、高精度的數(shù)據(jù)支持。工程師可在試制樣車上快速安裝設(shè)備,完成最小轉(zhuǎn)彎直徑與外擺值的實(shí)車驗(yàn)證,將實(shí)測數(shù)據(jù)與設(shè)計(jì)參數(shù)對(duì)比,判斷底盤布置是否滿足預(yù)期。設(shè)備不...
2025-12-17 -
天津多國標(biāo)兼容車輛方向盤測量廠家電話
憑借模塊化的架構(gòu)設(shè)計(jì),測試設(shè)備對(duì)多樣化車型的適配能力得到明顯增強(qiáng)。系統(tǒng)將傳感器單元、信號(hào)處理模塊和數(shù)據(jù)分析功能解耦為單獨(dú)組件,可根據(jù)不同車輛的軸距、輪距和車身高度進(jìn)行靈活組合與參數(shù)調(diào)整。這種設(shè)計(jì)避免了為每種車型配置特定設(shè)備的需求,一套系統(tǒng)即可覆蓋從緊湊型車到大...
2025-12-17 -
 湖北農(nóng)機(jī)測速裝置廠家聯(lián)系方式
湖北農(nóng)機(jī)測速裝置廠家聯(lián)系方式自動(dòng)駕駛技術(shù)的發(fā)展依賴高精度定位系統(tǒng)的支撐,RTK組合導(dǎo)航成為實(shí)現(xiàn)厘米級(jí)定位的關(guān)鍵技術(shù)路徑。該技術(shù)融合實(shí)時(shí)動(dòng)態(tài)載波相位差分的高精度特性與慣性導(dǎo)航系統(tǒng)的自主連續(xù)性,形成優(yōu)勢互補(bǔ)。RTK通過基準(zhǔn)站提供的差分修正數(shù)據(jù),明顯降低全球?qū)Ш叫l(wèi)星系統(tǒng)的定位誤差,但其性能易受...
2025-12-17 -
 廣西深耦合衛(wèi)星定位系統(tǒng)批發(fā)
廣西深耦合衛(wèi)星定位系統(tǒng)批發(fā)組合導(dǎo)航技術(shù)的價(jià)值除了體現(xiàn)在定位精度的提升,更在于其對(duì)系統(tǒng)整體可靠性的增強(qiáng)。通過多源數(shù)據(jù)融合,系統(tǒng)能夠有效抑制單一傳感器的固有誤差,例如全球?qū)Ш叫l(wèi)星系統(tǒng)的多路徑效應(yīng)或慣性單元的漂移問題,從而獲得更可靠的定位結(jié)果。當(dāng)某一子系統(tǒng)因環(huán)境干擾或硬件故障失效時(shí),其余傳感...
2025-12-17 -
內(nèi)蒙古國產(chǎn)測速裝置采購
交通環(huán)境的復(fù)雜性對(duì)定位系統(tǒng)提出了更高挑戰(zhàn),促使GNSS組合導(dǎo)航技術(shù)不斷演進(jìn)。該技術(shù)通過融合全球?qū)Ш叫l(wèi)星系統(tǒng)的精確定位信息與慣性導(dǎo)航系統(tǒng)傳感器的相對(duì)運(yùn)動(dòng)數(shù)據(jù),構(gòu)建適應(yīng)多變場景的定位方案。GNSS可接收來自多個(gè)衛(wèi)星星座的信號(hào),提供全球范圍內(nèi)的定位服務(wù),但其信號(hào)易受...
2025-12-17 -
 寧夏無人機(jī)測速儀廠家聯(lián)系方式
寧夏無人機(jī)測速儀廠家聯(lián)系方式組合導(dǎo)航系統(tǒng)中的導(dǎo)航引擎承擔(dān)著多源數(shù)據(jù)融合與狀態(tài)解算的重要任務(wù),負(fù)責(zé)處理來自全球?qū)Ш叫l(wèi)星系統(tǒng)、慣性測量單元等傳感器的原始觀測值。該模塊通常基于卡爾曼濾波或其改進(jìn)算法,對(duì)各類信息進(jìn)行加權(quán)估計(jì),動(dòng)態(tài)抑制噪聲與系統(tǒng)誤差,輸出可靠性強(qiáng)的位置、速度和姿態(tài)結(jié)果。在衛(wèi)星信號(hào)...
2025-12-17 -
 上海三輪汽車側(cè)翻試驗(yàn)臺(tái)廠家
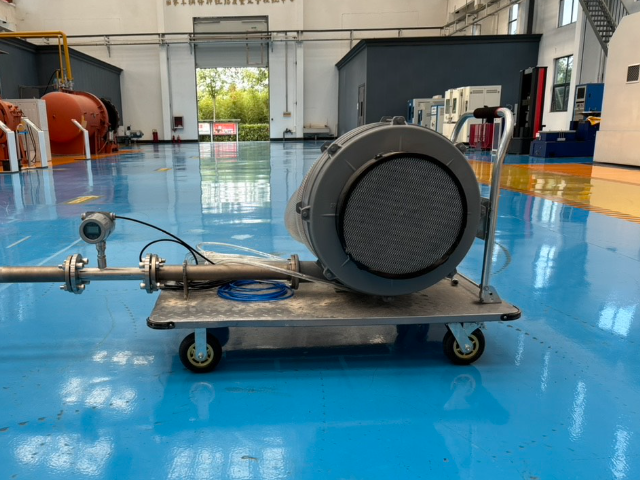
上海三輪汽車側(cè)翻試驗(yàn)臺(tái)廠家針對(duì)半掛車這類大型運(yùn)輸裝備,側(cè)翻風(fēng)險(xiǎn)直接關(guān)系到道路交通安全,因此對(duì)其穩(wěn)定性進(jìn)行科學(xué)評(píng)估至關(guān)重要。適配的側(cè)翻試驗(yàn)臺(tái)采用大尺寸承載平臺(tái),能夠容納牽引車與掛車組合體,通過液壓系統(tǒng)實(shí)現(xiàn)臺(tái)面的精確傾斜。測試時(shí)車輛按標(biāo)準(zhǔn)裝載狀態(tài)停放在平臺(tái)上,隨平臺(tái)角度逐步增加,高精度傳感...
2025-12-17 -
 江西多國標(biāo)兼容整車操縱穩(wěn)定性測試設(shè)備有哪些品牌
江西多國標(biāo)兼容整車操縱穩(wěn)定性測試設(shè)備有哪些品牌近年來,國內(nèi)車身姿態(tài)測試設(shè)備制造產(chǎn)業(yè)逐步發(fā)展,形成了一批具備自主研發(fā)與生產(chǎn)能力的專業(yè)企業(yè)。這些制造商專注于汽車整車及零部件動(dòng)態(tài)性能的檢測需求,產(chǎn)品廣泛應(yīng)用于主機(jī)廠研發(fā)、生產(chǎn)質(zhì)檢以及第三方檢測機(jī)構(gòu)。設(shè)備功能覆蓋車輛外擺值、最小轉(zhuǎn)彎直徑、直角彎道通過性、轉(zhuǎn)向系統(tǒng)性...
2025-12-17 -
中國香港雙天線定位系統(tǒng)公司
組合導(dǎo)航設(shè)備的采購決策需綜合考慮性能需求與成本結(jié)構(gòu)。傳感器的精度等級(jí)是影響價(jià)格的關(guān)鍵因素,高穩(wěn)定性慣性測量單元和多系統(tǒng)多頻點(diǎn)全球?qū)Ш叫l(wèi)星接收機(jī)的研發(fā)與制造成本較高,直接體現(xiàn)在產(chǎn)品定價(jià)中。算法復(fù)雜度同樣決定成本,深度融合或深耦合架構(gòu)需要大量研發(fā)投入,其技術(shù)價(jià)值體...
2025-12-17 -
 江蘇多國標(biāo)兼容車輛轉(zhuǎn)向角度測量有哪些品牌
江蘇多國標(biāo)兼容車輛轉(zhuǎn)向角度測量有哪些品牌車輛制造企業(yè)面臨多標(biāo)準(zhǔn)并行的檢測要求,武漢朗維科技有限公司的車身姿態(tài)測試系統(tǒng)的多標(biāo)準(zhǔn)兼容能力為此提供了高效解決方案。該系統(tǒng)集成了對(duì)GB 1589-2016、GB/T12540-2009、JT/T 1178.1-2018等多項(xiàng)技術(shù)規(guī)范的支持,無需更換設(shè)備或重復(fù)搭...
2025-12-17 -
 湖南整車操縱穩(wěn)定性測試設(shè)備廠家
湖南整車操縱穩(wěn)定性測試設(shè)備廠家對(duì)于檢測機(jī)構(gòu)和主機(jī)廠而言,車身姿態(tài)測試設(shè)備的測試效率直接影響項(xiàng)目進(jìn)度與資源周轉(zhuǎn)。而武漢朗維科技有限公司的非侵入式車身姿態(tài)測試設(shè)備效率很高,設(shè)備采用一體化集成設(shè)計(jì),將多源傳感器與數(shù)據(jù)處理單元高度整合,無需外接線纜或復(fù)雜調(diào)試。客戶在進(jìn)行不同車型測試時(shí),只需將設(shè)備吸...
2025-12-17 -
 遼寧無人機(jī)GNSS定向批發(fā)
遼寧無人機(jī)GNSS定向批發(fā)高精度組合導(dǎo)航系統(tǒng)在實(shí)際應(yīng)用中展現(xiàn)出穩(wěn)定的綜合性能。系統(tǒng)集成高精度測量與導(dǎo)航引擎,支持實(shí)時(shí)動(dòng)態(tài)差分解算,可在開闊區(qū)域?qū)崿F(xiàn)厘米級(jí)水平定位精度與亞米級(jí)垂直精度。在城市高樓區(qū)、立交橋下等信號(hào)受限場景中,依托深耦合算法與高性能慣性測量單元,系統(tǒng)仍能保持亞米級(jí)定位能力,...
2025-12-17 -
廣東工程GNSS定向價(jià)格
自動(dòng)泊車與低速機(jī)動(dòng)場景中,車輛航向角的精確感知是順利入庫的前提。傳統(tǒng)單天線GNSS在靜止或低速狀態(tài)下無法有效解算航向,依賴輪速差推算易受輪胎打滑或胎壓差異影響。雙天線定向技術(shù)通過測量載波相位差,可在靜態(tài)條件下輸出高精度航向角,解決低速轉(zhuǎn)向模糊問題。武漢朗維科技...
2025-12-17 -
吉林多國標(biāo)兼容車輛外擺值測量試驗(yàn)設(shè)備多少錢
現(xiàn)代車身姿態(tài)測試設(shè)備的關(guān)鍵在于其搭載的高精度傳感系統(tǒng),這些組件直接決定了測量結(jié)果的準(zhǔn)確性與可信度。通過集成慣性測量單元、激光定位器和角度編碼器等先進(jìn)元件,設(shè)備能夠?qū)崟r(shí)捕捉車輛在轉(zhuǎn)向過程中的外擺值、最小轉(zhuǎn)彎直徑等關(guān)鍵幾何參數(shù)。傳感器具備高采樣率和強(qiáng)抗干擾能力,可...
2025-12-17 -
江西叉車五輪儀廠家
車身姿態(tài)測試設(shè)備基于高精度慣性導(dǎo)航與衛(wèi)星定位融合技術(shù),集成三軸陀螺儀、加速度計(jì)和全球?qū)Ш叫l(wèi)星接收模塊,構(gòu)建多源傳感器系統(tǒng)。設(shè)備通過實(shí)時(shí)采集車輛在動(dòng)態(tài)行駛中的角速度、線加速度及空間位置信息,結(jié)合卡爾曼濾波算法,實(shí)現(xiàn)對(duì)車輛運(yùn)動(dòng)狀態(tài)的精確解算。慣性測量單元負(fù)責(zé)捕捉車...
2025-12-17 -
 遼寧高精度衛(wèi)星定位系統(tǒng)價(jià)格
遼寧高精度衛(wèi)星定位系統(tǒng)價(jià)格在全球不同地區(qū),GNSS網(wǎng)絡(luò)覆蓋情況差異較大,部分偏遠(yuǎn)地區(qū)可能無法獲得理想的差分服務(wù)。為了適應(yīng)這些復(fù)雜環(huán)境,組合導(dǎo)航系統(tǒng)需要具備多種差分模式的支持。武漢朗維科技有限公司研發(fā)的組合導(dǎo)航設(shè)備支持NRTK、PPP和PPP-RTK技術(shù),能夠在不同網(wǎng)絡(luò)條件下靈活切換,確...
2025-12-17 -
廣東自適應(yīng)測速裝置公司
組合導(dǎo)航產(chǎn)品的批量供應(yīng)正朝著靈活化與集成化方向發(fā)展。批發(fā)渠道提供不同性能層級(jí)和配置選項(xiàng),以滿足科研測試、樣機(jī)驗(yàn)證到規(guī)模化部署的多樣化需求。大規(guī)模采購除價(jià)格優(yōu)勢外,還需考慮庫存管理與資金周轉(zhuǎn),選擇與項(xiàng)目進(jìn)度相匹配的供貨節(jié)奏。為保障產(chǎn)品一致性和質(zhì)量可追溯性,建議優(yōu)...
2025-12-17 -
上海雙天線GNSS定位
在城市峽谷或地下通道等衛(wèi)星信號(hào)受限的區(qū)域,傳統(tǒng)定位方式常出現(xiàn)中斷或跳變,組合導(dǎo)航系統(tǒng)通過融合全球?qū)Ш叫l(wèi)星系統(tǒng)、慣性導(dǎo)航與地圖匹配等多種技術(shù)手段,有效應(yīng)對(duì)這一挑戰(zhàn)。全球?qū)Ш叫l(wèi)星系統(tǒng)提供長期穩(wěn)定的精確方位基準(zhǔn),而慣性導(dǎo)航在信號(hào)中斷期間依靠加速度計(jì)和陀螺儀推算短時(shí)運(yùn)...
2025-12-17 -
重慶自適應(yīng)GNSS定位報(bào)價(jià)
在電磁環(huán)境復(fù)雜的區(qū)域維持定位穩(wěn)定性,是組合導(dǎo)航系統(tǒng)的一項(xiàng)關(guān)鍵能力。為應(yīng)對(duì)各類干擾源,系統(tǒng)采用多種技術(shù)手段協(xié)同提升抗干擾性能。多頻點(diǎn)全球?qū)Ш叫l(wèi)星接收機(jī)可同時(shí)接收多個(gè)頻段信號(hào),以防單頻干擾導(dǎo)致的信號(hào)失鎖。自適應(yīng)天線陣列通過波束成形技術(shù),主動(dòng)抑制來自特定方向的干擾信...
2025-12-17 -
 國產(chǎn)整車動(dòng)力性能檢測設(shè)備價(jià)格
國產(chǎn)整車動(dòng)力性能檢測設(shè)備價(jià)格轉(zhuǎn)向動(dòng)作的準(zhǔn)確性直接影響車輛的操控品質(zhì),車身姿態(tài)測試設(shè)備在轉(zhuǎn)角精度測量方面具備高度可靠性。系統(tǒng)采用高分辨率角度傳感技術(shù),同步采集方向盤轉(zhuǎn)角與車輪實(shí)際偏轉(zhuǎn)角度,構(gòu)建兩者之間的動(dòng)態(tài)對(duì)應(yīng)關(guān)系。通過分析傳動(dòng)過程中的非線性偏差、回程間隙及響應(yīng)延遲,評(píng)估轉(zhuǎn)向系統(tǒng)的整體精度...
2025-12-17 -
四川數(shù)字化施工GNSS定向采購
自動(dòng)泊車與低速機(jī)動(dòng)場景中,車輛航向角的精確感知是順利入庫的前提。傳統(tǒng)單天線GNSS在靜止或低速狀態(tài)下無法有效解算航向,依賴輪速差推算易受輪胎打滑或胎壓差異影響。雙天線定向技術(shù)通過測量載波相位差,可在靜態(tài)條件下輸出高精度航向角,解決低速轉(zhuǎn)向模糊問題。武漢朗維科技...
2025-12-17 -
 福建冷藏車密封性能測試設(shè)備廠家聯(lián)系方式
福建冷藏車密封性能測試設(shè)備廠家聯(lián)系方式氣密性是冷藏車維持內(nèi)部溫度穩(wěn)定的重要因素,冷藏車氣密性試驗(yàn)設(shè)備專門用于檢測這一性能指標(biāo)。設(shè)備通過向密封車廂內(nèi)部注入空氣或抽真空,形成壓力差,隨后監(jiān)測壓力變化情況,判斷是否存在泄漏通道。測試過程覆蓋門框密封、接縫連接及管線穿孔等易漏區(qū)域,確保整體密封性達(dá)標(biāo)。壓力...
2025-12-17 -
 整車運(yùn)動(dòng)性能檢測設(shè)備是什么
整車運(yùn)動(dòng)性能檢測設(shè)備是什么針對(duì)不同國家標(biāo)準(zhǔn)的測試要求,車身姿態(tài)測試設(shè)備采用單獨(dú)的算法模塊進(jìn)行對(duì)應(yīng)處理。例如GB/T 12540規(guī)定的最小轉(zhuǎn)彎直徑測量與JT/T 1178.1中的直角彎通過性試驗(yàn),雖均基于軌跡分析,但評(píng)判條件和路徑定義存在差異。設(shè)備通過配置特定計(jì)算邏輯,分別按照各標(biāo)準(zhǔn)定義...
2025-12-17 -
 重慶半掛車側(cè)翻試驗(yàn)臺(tái)哪家好
重慶半掛車側(cè)翻試驗(yàn)臺(tái)哪家好在能源成本持續(xù)上升的背景下,設(shè)備運(yùn)行的節(jié)能性成為企業(yè)關(guān)注的重點(diǎn)。武漢朗維的車輛側(cè)翻試驗(yàn)臺(tái)采用雙平臺(tái)單獨(dú)控制設(shè)計(jì),支持“平臺(tái)1”與“平臺(tái)2”分別啟停,小噸位車輛測試時(shí)可只啟用單側(cè)系統(tǒng),避免全功率運(yùn)行造成的能源浪費(fèi)。液壓系統(tǒng)由30kW電機(jī)驅(qū)動(dòng),配備流量可調(diào)泵站(0...
2025-12-17 -
 天津掛車側(cè)翻試驗(yàn)臺(tái)廠家
天津掛車側(cè)翻試驗(yàn)臺(tái)廠家車企在選擇半掛車側(cè)翻試驗(yàn)臺(tái)供應(yīng)商時(shí),需綜合考慮多方面因素。技術(shù)實(shí)力與創(chuàng)新能力是首要考量,理想的供應(yīng)商應(yīng)具備強(qiáng)大的研發(fā)能力和相關(guān)獨(dú)有技術(shù)。售后服務(wù)不可忽視,好的供應(yīng)商應(yīng)提供完整的技術(shù)支持、培訓(xùn)以及維護(hù)服務(wù)。行業(yè)口碑和用戶評(píng)價(jià)也是參考點(diǎn)之一,車企可通過實(shí)地考察或同...
2025-12-16