-
外賣族“三高”風(fēng)險攀升 個性化健康方案受關(guān)注
-
運動常受傷?基因檢測為科學(xué)運動“保駕護(hù)航”
-
聚焦口腔菌群平衡,華壹健康為反復(fù)口腔潰瘍者開“良方”
-
西安華壹健康:以基因檢測技術(shù) 護(hù)航孕期健康新旅程
-
換季就遭罪?華壹健康基因檢測幫你讀懂身體信號
-
護(hù)膚品頻換仍過敏?基因檢測為皮膚健康尋
-
兒童營養(yǎng)補劑別亂買 科學(xué)檢測助家長理性判斷
-
“護(hù)膚屢踩坑?基因檢測為愛美人士解鎖科學(xué)護(hù)膚新路徑
-
關(guān)注小升初成長關(guān)鍵期 華壹健康助力科學(xué)因材施教
-
牙齦出血別硬扛!口腔微生態(tài)檢測+益生菌來護(hù)航
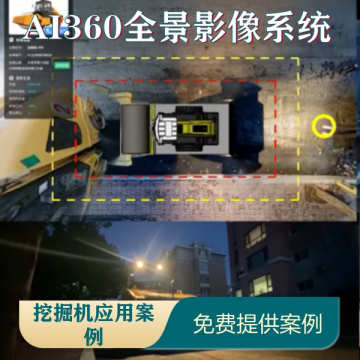
AI360全景影像系統(tǒng)定制方案|AI360全景影像系統(tǒng)多傳感器定制方案|AI360全景影像系統(tǒng)視覺+距離融合定制方案
為什么車侶AI360全景影像系統(tǒng)有BSD盲區(qū)預(yù)警功能了,還要加超聲波雷達(dá),有哪些區(qū)別?
車侶AI360全景影像系統(tǒng)的BSD盲區(qū)預(yù)警功能與超聲波雷達(dá)在技術(shù)原理、應(yīng)用場景和性能特性上存在明顯差異,二者通過多傳感器融合實現(xiàn)“視覺+距離”雙重防護(hù),具體區(qū)別如下:
一、技術(shù)原理與功能定位
1. BSD盲區(qū)預(yù)警(視覺主導(dǎo))
核X原理:基于360°全景攝像頭采集的視頻流,通過AI視覺算法(如目標(biāo)檢測、軌跡跟蹤)識別車輛周邊盲區(qū)(如側(cè)方、后方)的移動物體(行人、車輛、障礙物等),并根據(jù)距離劃分一級/二級預(yù)警(如“大車危險”語音提示、LED閃光燈閃爍、顯示屏圖像放大)。
功能側(cè)重:
動態(tài)場景感知:重點識別運動目標(biāo)(如橫穿馬路的行人、超車車輛),支持自定義預(yù)警區(qū)域(如車身兩側(cè)25米范圍)。
可視化輔助:通過全景拼接影像直觀展示障礙物相對位置,幫助駕駛員判斷環(huán)境(如泊車時觀察低矮障礙物)。
2. 超聲波雷達(dá)(距離主導(dǎo))
核X原理:通過發(fā)射超聲波信號并接收回波,計算障礙物與車輛的精確距離(通常0.15米),輸出距離數(shù)據(jù)至顯控終端,觸發(fā)分級聲光報警(如蜂鳴頻率隨距離縮短而加快)。
功能側(cè)重:
靜態(tài)近距離探測:擅長檢測低矮、靜止障礙物(如路沿石、立柱、兒童),彌補攝像頭對非視覺特征物體(如深色物體、玻璃幕墻)的識別盲區(qū)。
精度補充:提供厘米級距離數(shù)據(jù),支持“距離數(shù)字顯示+動態(tài)引導(dǎo)線”,輔助精細(xì)泊車(如控制與障礙物的安全間距)。
二、性能差異與場景適配
1. 環(huán)境適應(yīng)性
BSD視覺系統(tǒng):
優(yōu)勢:全天候?qū)崟r影像,適用于開闊道路的動態(tài)盲區(qū)監(jiān)測(如高速變道、路口轉(zhuǎn)彎)。
局限:受光照(強光、逆光)、天氣(暴雨、沙塵、大霧)和遮擋(如樹葉、污漬)影響較大,可能出現(xiàn)誤識別或漏檢。
超聲波雷達(dá):
優(yōu)勢:不受光照、天氣干擾,抗電磁干擾能力強,適用于隧道、車庫、工地等復(fù)雜場景的近距離探測。
局限:探測距離較短(通常≤5米),對高速移動物體響應(yīng)延遲較高,無法識別目標(biāo)類型(如行人vs障礙物)。
2. 目標(biāo)識別能力
BSD:通過AI算法可區(qū)分行人、車輛、自行車等目標(biāo)類型,支持行為預(yù)測(如判斷行人是否有橫穿意圖),并聯(lián)動視頻畫面放大危險區(qū)域,幫助駕駛員快速決策。
超聲波雷達(dá):JIN能感知障礙物存在及距離,無法識別目標(biāo)屬性,需依賴視覺系統(tǒng)補充目標(biāo)類型信息(如“雷達(dá)報警+攝像頭畫面確認(rèn)”)。
3. 預(yù)警邏輯互補
BSD:基于目標(biāo)運動趨勢預(yù)警(如側(cè)方車輛快速接近),觸發(fā)條件與相對速度、方向相關(guān),適合中高速行駛場景(如城市道路、高速路)。
超聲波雷達(dá):基于絕D距離預(yù)警(如倒車時距墻1米觸發(fā)一級報警),適合低速泊車、狹窄通道通過等場景,防止碰撞低矮或靜止物體。
三、多傳感器融合的必要性
車侶AI360系統(tǒng)采用“視覺+雷達(dá)”融合方案,核X價值在于:
1. 冗余備份:單一傳感器失效時(如攝像頭被泥水遮擋、雷達(dá)信號受金屬干擾),另一系統(tǒng)仍能提供基礎(chǔ)預(yù)警,避免“感知盲區(qū)”導(dǎo)致事故。
2. 精度提升:視覺提供目標(biāo)類型與場景上下文,雷達(dá)提供精確距離數(shù)據(jù),融合后實現(xiàn)“是什么物體+距離多遠(yuǎn)+是否危險”的綜合判斷。
3. 場景全覆蓋:從高速行駛的動態(tài)盲區(qū)監(jiān)測(BSD主導(dǎo))到低速泊車的近距離防護(hù)(雷達(dá)主導(dǎo)),二者無縫銜接,覆蓋車輛全工況安全需求。
四、典型應(yīng)用案例
工程車輛場景(如裝載機、壓路機):
BSD通過攝像頭識別工地穿行的工人、叉車,觸發(fā)聲光報警并聯(lián)動限速;
超聲波雷達(dá)檢測車身下方的碎石、工具等低矮障礙物,避免行駛中剮蹭底盤。
商用車場景(如物流貨車):
變道時,BSD預(yù)警側(cè)方快速接近的車輛;
倒車入庫時,雷達(dá)實時顯示與貨臺的距離,輔助精細(xì)停靠。
總結(jié)
AI360全景影像系統(tǒng)傳感器融合定制方案的BSD盲區(qū)預(yù)警與超聲波雷達(dá)并非替代關(guān)系,而是通過“視覺動態(tài)識別+雷達(dá)距離測量”的技術(shù)互補,構(gòu)建車周環(huán)境的“雙重安全防線”。這種融合方案既解決了單一傳感器的性能局限,又適應(yīng)了復(fù)雜場景下的多樣化安全需求,ZUI終實現(xiàn)“無死角感知+精細(xì)預(yù)警+多場景適配”的主動安全防護(hù)能力。
- 江蘇4G通信主動安全預(yù)警系統(tǒng)開發(fā)平臺 2025-12-22
- 廣州升降機360度全景攝像頭 2025-12-22
- 龍門架360全景影像設(shè)備哪個牌子好 2025-12-22
- 江蘇工程車6路360全景 2025-12-22
- AI360全景影像系統(tǒng)定制方案|AI360全景影像系統(tǒng)多傳感器定制方案|AI360全景影像系統(tǒng)視覺+距離融合定制方案 2025-12-22
- 廣東推土車360環(huán)視攝像頭 2025-12-22
- 深圳360拼接算法 2025-12-22
- 黑龍江掛車主動安全預(yù)警系統(tǒng)定制開發(fā) 2025-12-21
- 江蘇物流車主動安全預(yù)警系統(tǒng)定制開發(fā) 2025-12-21
- 海南360全景主動安全預(yù)警系統(tǒng)生產(chǎn)廠家 2025-12-21
- 奔馳無線電調(diào)減震為什么比普通減震貴 2025-12-22
- 常熟需求自動噴涂線服務(wù)電話 2025-12-22
- 江蘇質(zhì)量制冷劑廠家供應(yīng) 2025-12-22
- 汽車變速箱潤滑油選購 2025-12-22
- 長壽命柴油動力增壓泵優(yōu)惠價 2025-12-22
- 德莎遮蔽PVC膠帶供應(yīng)商 2025-12-22
- 江門水冷鏟齒散熱器報價 2025-12-22
- 臺州車輛加油救援公司 2025-12-22
- 舟山進(jìn)口輪廓度檢測哪家專業(yè) 2025-12-22
- 南京質(zhì)量汽車連接器廠家價格 2025-12-22