黑龍江機器人柔性力控裝配線束
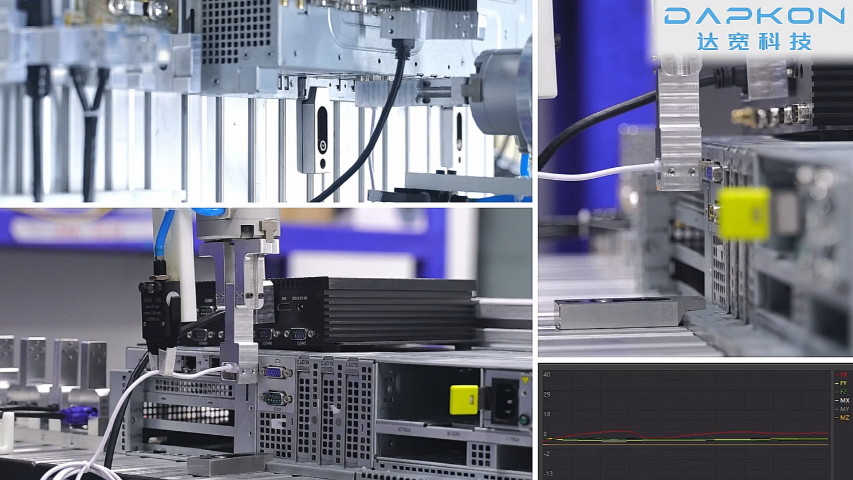
時間在生產中就是效益,機器人力控在節省時間方面表現突出。傳統人工裝配汽車線束保險絲,需工人憑借經驗反復調整,過程繁瑣且耗時。而采用力控裝配,機器人能依據預設程序與實時力反饋快速行動。達寬科技的力控系統擁有力 - 位混合控制功能,機器人在執行任務時,可同時兼顧位置定位與接觸力調節。在尋找位置時,快速定位到大致位置后,力控系統迅速發揮作用,憑借對力的精細感知,以極快速度完成細微調整,完成裝配。相比人工操作,極大地縮短了單個產品的裝配時間,為企業提升產能、快速響應市場需求提供有力支持 。達寬科技力控裝配實時感知線束插接阻力,動態調整機器人姿態,減少人工反復調整時間。黑龍江機器人柔性力控裝配線束
達寬科技的力控裝配技術在提升裝配效率方面展現出了巨大的優勢。傳統的裝配工藝往往依賴于固定的程序和軌跡,難以適應零件尺寸的微小變化和裝配過程中的不確定性,導致裝配效率低下。而機器人力控軸孔裝配則完全不同,其在于對力的精確感知與實時反饋控制。在裝配過程中,機器人能夠根據實時監測到的力反饋信息,自動調整裝配速度和力度,確保裝配過程的平穩進行。例如,當遇到裝配阻力增大時,機器人會自動降低速度并增加推力,避免卡頓和損壞;而當阻力減小時,又能迅速恢復正常的裝配速度,從而縮短了單個產品的裝配時間。此外,力控裝配系統還具備自適應學習能力,能夠不斷優化裝配策略,使得機器人的裝配動作越來越流暢、高效。據統計,在采用達寬科技的力控裝配方案后,企業的裝配效率得到了提升,生產節拍更加緊湊,整體產能得到了有效釋放,為企業在激烈的市場競爭中贏得了寶貴的時間優勢。貴州柔性裝配電機達寬力控維持齒輪裝配穩定節奏,保證生產不停頓,提升整體生產效率。
曲軸與軸套的裝配常面臨配合間隙微小的挑戰,傳統剛性機器人因無法應對零件公差與工裝累積誤差,易導致裝配卡頓或工件損傷。達寬科技的力控裝配系統通過高精度六維力傳感器實時監測接觸面微觀力變化,動態調整機器人末端姿態。例如在曲軸嵌套過程中,系統依據阻力曲線自動優化壓裝軌跡,主動補償位置與角度偏差,無需依賴超高精度定位工裝即可完成平穩裝配。這種“感知-響應”閉環大幅減少人工調試環節,產線換型時調用預設力控參數即可適配新規格曲軸,縮短設備重構時間,保障連續生產節奏。達寬科技的力控裝配方案以柔性控制替代硬性定位,為精密軸孔裝配提供了可靠的技術支撐。
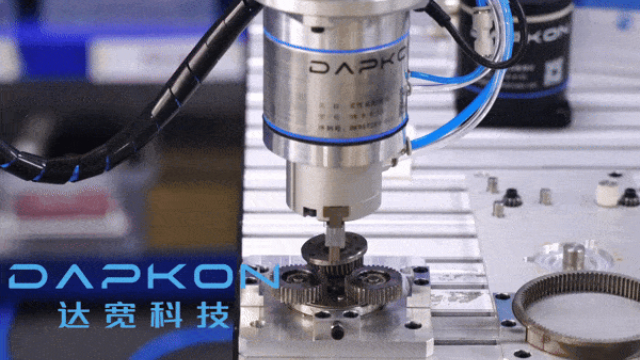
在齒輪裝配領域,達寬科技的力控裝配方案為企業帶來了諸多革新。傳統的機器人齒輪裝配過程中,由于齒輪間復雜的嚙合關系以及安裝位置的嚴苛要求,常因位置偏差或力度不均,導致齒輪安裝不到位,影響產品后續運行。而達寬科技的力控裝配技術通過搭載先進的力傳感器,能實時監測機器人在裝配齒輪時的受力情況。當機器人推動齒輪進入安裝位置時,一旦力反饋出現異常,比如遇到過大阻力,系統會迅速做出反應,引導機器人微調角度或改變推進力度,就像經驗豐富的工人憑借手感靈活調整操作一樣,從而確保齒輪精細嚙合,減少裝配失誤,助力企業提升齒輪裝配的質量。
在工業自動化領域,機器人力控裝配技術正逐步成為提升生產效率的關鍵工具。達寬科技專注于開發先進的力控裝配系統,使機器人能夠精確執行軸孔裝配任務。通過實時力傳感器和智能控制機制,力控裝配允許機器人在裝配過程中動態調整施加的力度,確保軸與孔的順暢插入。這種方法減少了傳統裝配中的手動干預需求,幫助企業實現更流暢的生產流程。采用達寬科技的力控裝配方案,企業可以觀察到裝配速度的提升,因為機器人能夠連續工作而不受疲勞影響。力控裝配還優化了資源利用,降低了能源消耗,從而支持可持續制造。達寬科技的力控裝配系統設計簡潔,易于集成到現有生產線中,提供即時的操作改進。在軸孔裝配場景中,力控裝配展現了高度適應性,處理不同尺寸和材料的部件時保持穩定。企業選擇達寬科技的力控裝配,能夠邁出自動化轉型的第一步,享受技術帶來的長期效率提升。力控裝配技術助力電機齒輪裝配精度提升。達寬科技機器人自動修正裝配偏差,確保齒輪裝配的準確性和可靠性。海南柔性力控裝配方案
采用達寬科技力控裝配,電機齒輪裝配效率大幅提升。機器人穩定作業,減少人工干預,縮短裝配時間。黑龍江機器人柔性力控裝配線束
在行星齒輪裝配的工業生產中,安全性不容忽視。行星齒輪質地堅硬且有一定重量,裝配時若機器人操作不當,產生過大沖擊力,可能使齒輪位移、變形,損壞設備,還會威脅周邊操作人員人身安全。達寬科技力控裝配方案在安全保障方面表現突出。其裝配系統時刻監測裝配力變化,一旦力數值超出安全范圍,立即觸發應急機制,使機器人迅速停止動作或改變運行路徑,避免危險發生。這種主動防護機制為生產車間筑起安全屏障,有效預防操作失誤引發的安全事故,為工人創造安全工作環境,讓企業生產活動安全、平穩開展,減少潛在風險損失。黑龍江機器人柔性力控裝配線束
- 河北機器人柔性裝配電機 2025-12-19
- 湖北簡控力控系統供應商 2025-12-19
- 湖南協作機器人力控軟件 2025-12-19
- 北京高精度力控系統方案 2025-12-19
- 北京測試力控系統 2025-12-19
- 河南抓取力控系統軟件 2025-12-19
- 浙江檢測力控系統廠家 2025-12-19
- 黑龍江機器人柔性力控裝配線束 2025-12-19
- 內蒙古協作機器人力控使用方法 2025-12-19
- 湖北力控系統配置 2025-12-19
- 陽江4K會議一體機代理商 2025-12-20
- 甘肅自動化智能手表 2025-12-20
- 房山區GPU服務器機箱加工 2025-12-20
- 全椒數字化弱電智能化集成技術 2025-12-20
- 廣西**智能撰寫云端協作 2025-12-20
- 鹽城砷化鎵晶圓切割刀片 2025-12-20
- 無錫進口保護殼銷售價格 2025-12-20
- 新鄉云服務特點 2025-12-20
- 多功能工業機器人管理模式 2025-12-20
- 金山區無人機飛控系統生產廠家 2025-12-20