海南機器人柔性裝配齒輪
曲軸作為動力傳動的關鍵部件,其裝配質量直接影響設備運行穩定性與壽命。人工操作易受經驗差異影響,而達寬科技的力控裝配通過數字化閉環控制,確保每根曲軸的壓裝深度與軸向壓力穩定在工藝窗口內。系統實時生成力-位移曲線報告,為工藝優化提供量化依據,例如嚴格控制軸承預緊力區間,避免過載導致的軸瓦磨損或預緊力不足引發的異常振動。力控裝配的重復精度優勢從源頭提升產品可靠性,減少設備磨合期故障率,同時降低返修成本。達寬科技的力控系統將裝配經驗轉化為可復用的標準化參數,助力企業實現質量均衡的規模化生產。
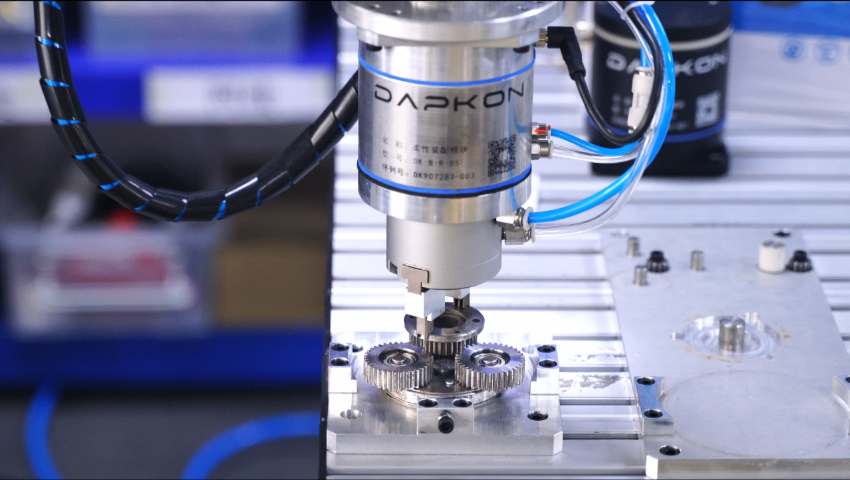
達寬科技的機器人力控電機齒輪裝配方案,憑借其的性能,為用戶帶來了前所未有的高效裝配體驗。在齒輪裝配領域,尤其是軸孔裝配這一關鍵環節,力控技術展現出了的魅力。機器人搭載力控系統后,仿佛擁有了智慧的雙手,能夠在裝配過程中實時感知并應對各種復雜情況。它可以根據齒輪與軸的配合狀況,自動調整裝配力度,確保每一次裝配都恰到好處。這種智能調整能力,使得裝配時間得到了極大縮短。機器人無需頻繁暫停或重新校準,即可順利完成裝配任務,有效提高了生產效率。而且,由于力控裝配能夠精確控制裝配過程,產品的一致性得到了提升。每一件經過力控裝配的齒輪產品,其裝配質量都能保持在較高水準,減少了因裝配差異導致的后續問題。在安全性方面,力控裝配同樣表現出色。機器人按照預設的力控參數進行操作,避免了過度用力可能對設備或人員造成的損害。此外,達寬科技還為該方案配備了完善的安全監控系統,一旦檢測到異常情況,能夠立即暫停裝配作業,確保生產環境的安全穩定。選擇達寬科技的機器人力控齒輪裝配方案,就是選擇了一種高效、穩定、安全的生產方式,助力企業在激烈的市場競爭中脫穎而出。陜西自動化裝配齒輪達寬力控系統維持生產穩定,機器人穩定作業,確保齒輪裝配流程順暢進行。
達寬科技的力控裝配技術在齒輪裝配效率提升方面具有優勢。與傳統裝配工藝相比,力控裝配能夠使機器人在裝配過程中更加智能地應對各種復雜情況,從而縮短單個齒輪的裝配時間。在傳統的自動化齒輪裝配中,機器人通常按照固定的程序和軌跡進行操作,一旦遇到齒輪與軸之間的干涉或錯位等問題,往往會導致裝配失敗或需要人工干預,這不僅浪費了時間,還增加了生產成本。而采用力控裝配的機器人則不同,它們能夠通過實時的力反饋,自動調整裝配路徑和速度,快速適應齒輪的位置偏差和尺寸變化。例如,當齒輪與軸的初始位置存在一定的偏差時,力控裝配機器人可以通過輕微的擺動和調整,尋找比較好的裝配角度和位置,而不是像傳統機器人那樣只能 按照預設路徑反復嘗試,從而減少了裝配過程中的無效動作和等待時間。此外,力控裝配系統還具備自適應學習功能,能夠不斷優化裝配策略,使機器人的裝配動作越來越流暢、高效。隨著裝配任務的不斷重復,機器人對不同型號齒輪的裝配技巧會越來越熟練,進一步提高裝配效率,幫助企業實現更高的生產節拍和產能輸出。
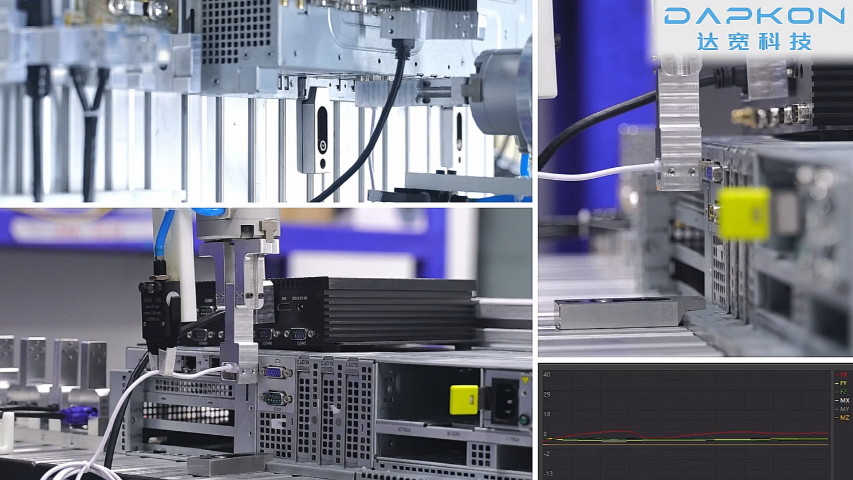
生產安全性是齒輪裝配的關鍵考量。達寬力控裝配系統集成多重防護機制:當機器人檢測到齒輪卡滯或碰撞風險時,毫秒級觸發柔性急停功能。例如在行星齒輪組壓裝中,若行星架與太陽輪發生異常干涉,系統依據實時力矢量分析自動回退并報警,避免精密零件損傷。該特性減少因設備硬碰撞導致的產線中斷,同時保護操作人員免受飛濺碎屑傷害。
達寬科技將復雜工藝簡化為可復用的力控策略。其模塊化設計支持主流工業機器人即插即用,用戶無需改造現有產線即可部署。在換型場景中,操作人員通過圖形化界面一鍵切換齒輪裝配參數,消除傳統機械工裝調整時間。系統還提供遠程監控接口,工程師可實時診斷裝配過程數據,同步優化力控曲線。這種“低門檻、高容錯”的特性,使企業能夠將熟練工人從重復性勞動中釋放,轉向工藝優化與異常管控等高價值任務,實現人力資源的升級配置。 力控裝配使線束裝配數據有跡可循,達寬系統助力生產管理水平提升。
電機傳動可靠性高度依賴齒輪嚙合力矩的均衡性。人工裝配易受操作經驗差異影響,而達寬科技的力控裝配通過數字化閉環控制,確保每套行星齒輪的壓裝深度與軸向壓力穩定在工藝窗口內。在減速器制造中,系統嚴格限定軸承預緊力區間,避免過載導致的齒面磨損或預緊力不足引發的運行異響。裝配過程生成的力-位移曲線報告為工藝優化提供量化依據,從源頭提升產品可靠性。力控裝配的重復精度優勢減少了磨合期故障率,延長了齒輪箱使用壽命,同時降低返修成本,幫助企業實現質量均衡的規模化輸出。
達寬科技力控裝配,適配多樣線束,快速切換模式,極大節省裝配模式切換時間。海南機器人柔性裝配齒輪
在現代制造業中,軸孔裝配作為關鍵工藝環節,對生產效率和產品質量有著重要影響。達寬科技的機器人力控裝配技術通過智能化的力控系統,為軸孔裝配提供了高效、靈活的解決方案。該技術通過實時監測和調整機器人施加的力與位置,確保在復雜裝配場景中實現穩定的操作。相比傳統手工或剛性自動化裝配,達寬科技的力控裝配系統能夠適應不同工件間的細微差異,例如零件尺寸公差或表面不規則性,從而減少因誤差導致的裝配失敗。機器人力控裝配通過動態調整力的大小和方向,使裝配過程更加順暢,減少了因過度施力或位置偏差導致的零件損傷和返工問題。這種技術特別適合高精度要求的場景,如汽車零部件、航空航天設備等領域。達寬科技的力控裝配模塊結合六個自由度的運動學設計,能夠靈活應對多角度、多方向的裝配需求,為企業提供了穩定且高效的生產支持。通過減少人工干預,機器人力控裝配不僅降低了操作的復雜性,還縮短了生產周期,幫助企業優化資源配置,提升整體生產效率。達寬科技致力于通過力控裝配技術,為制造業提供更具適應性的自動化解決方案,助力企業在競爭激烈的市場中保持優勢。海南機器人柔性裝配齒輪
- 福建自動化裝配流水線 2025-12-21
- 浙江智能柔性力控系統原理 2025-12-21
- 遼寧達寬科技力控系統報價 2025-12-21
- 湖北機器人柔性力控系統配置 2025-12-21
- 海南機器人柔性裝配齒輪 2025-12-21
- 中國香港柔性力控裝配流水線 2025-12-21
- 上海機器人力控系統使用方法 2025-12-21
- 北京拋光力控系統優點 2025-12-20
- 上海打磨力控系統廠家 2025-12-20
- 吉林力控裝配線束 2025-12-20
- 金山區短視頻制作大概多少錢 2025-12-21
- 適合學初中物理的軟件 2025-12-21
- 鳳陽工廠管理弱電智能化集成項目 2025-12-21
- 建鄴區科技數據定向分析 2025-12-21
- 南通環保智慧醫療操作 2025-12-21
- 長春超高頻讀寫器廠家 2025-12-21
- 湖北嵌入式液晶屏升降器品牌 2025-12-21
- 有哪些BIM協同平臺哪家便宜 2025-12-21
- 南山區指環式無線掃描槍 2025-12-21
- 陜西短視頻創作華為數字人的教程 2025-12-21