河北自動化直交機械手模組
直交機械手的工作基于電機驅動和控制系統的協同運作。當接收到外部指令后,控制器依據預設的程序,向電機發送相應的脈沖信號。以X軸電機為例,電機在接收到脈沖信號后開始旋轉,通過滾珠絲杠或同步帶等傳動裝置,將旋轉運動轉化為沿X軸方向的直線運動,帶動安裝在該軸上的滑塊及負載做直線位移。同理,Y軸和Z軸電機按照指令完成各自方向的運動,從而實現機械手在三維空間內的精確定位和復雜動作。在運動過程中,傳感器持續監測各軸的實際位置和運動狀態,并將這些信息反饋給控制器。若實際位置與指令位置存在偏差,控制器會迅速調整電機的運轉參數,使機械手回到正確的運動軌跡,確保每一次操作都能達到極高的精度要求,滿足半導體等高精度行業的生產需求。 性價比高的直坐標機械手,造價低于同等負重關節機器人!河北自動化直交機械手模組
直交機械手與協作機器人的對比與協同應用:直交機械手與協作機器人在工業自動化領域各有特點,二者既存在差異又可協同應用。直交機械手通常具備較高的負載能力與定位精度,適用于大規模、重復性強的工業生產任務,如汽車制造、電子加工等行業的物料搬運與加工操作。而協作機器人則更注重與人的安全協作,其柔性關節與智能傳感器能夠使其在與人近距離接觸時自動降低速度或停止運動,保障人員安全。協作機器人常用于需要人機互動的場景,如產品裝配、質量檢測等環節。在實際生產中,直交機械手與協作機器人可實現協同作業。例如,在電子產品的生產線上,直交機械手負責將大型零部件搬運至裝配區域,協作機器人則在操作人員的協助下完成精細的裝配工作,二者優勢互補,共同提高生產效率與產品質量,為企業帶來更高效、靈活的自動化生產解決方案。 貴州皮帶型直交機械手模具廠家塑膠行業中,直交機械手助力成型,提高生產,產品多樣!

直交機械手在醫療行業的應用挑戰與解決方案:醫療行業對設備的精度、可靠性以及安全性要求極高,直交機械手在該領域的應用面臨諸多挑戰。首先,醫療環境對設備的潔凈度要求苛刻,直交機械手需要具備良好的防塵、防細菌設計,以防止細菌滋生與傳播。為此,可采用特殊的表面處理工藝,使機械手表面光滑且不易吸附灰塵與細菌,同時在結構設計上減少易積塵的縫隙與角落。其次,醫療操作往往涉及高精度的動作,如微創手術中的器械操作,這對機械手的定位精度與運動穩定性提出了極高要求。通過采用更高精度的傳感器、優化控制算法以及提升機械結構的剛性等措施,能夠有效提高機械手的精度與穩定性。此外,醫療設備的安全性至關重要,直交機械手需要配備多重安全防護裝置,如急停按鈕、安全光幕等,確保在使用過程中不會對醫護人員與患者造成傷害。
隨著科技的不斷進步,直交機械手在未來將呈現出一系列新的發展趨勢。一方面,在精度和速度上會有更大突破。研發人員將通過改進材料、優化結構設計以及采用更先進的控制算法,使直交機械手的定位精度向亞微米甚至納米級邁進,同時進一步提升其運動速度,滿足如半導體制造中對超精細、超高速加工的需求。另一方面,智能化程度將大幅提升。借助人工智能、機器學習等技術,直交機械手將具備自主學習和自適應能力,能夠根據生產過程中的實時數據,自動優化運動軌跡和操作流程,應對復雜多變的生產任務。此外,模塊化設計也將成為趨勢,通過標準化的模塊組合,可快速定制出滿足不同行業、不同應用場景需求的直交機械手,降低研發和生產成本,縮短產品交付周期,為各行業的自動化升級提供更便捷、高效的解決方案。 擁有機器人視覺和力度感知的直交機械手,準確操作,適應復雜環境!
直交機械手的使用年限受多種因素影響。一般而言,質量可靠的直交機械手在正常使用和維護條件下,具備較長的使用壽命。例如,部分品牌的直交機械手宣稱可達80000公里免維護,這意味著在大量的運行里程內,其關鍵部件能保持良好的工作狀態,無需頻繁維修更換。這得益于其采用的優等材料以及先進的制造工藝,如抗大力矩載荷的4列圓弧溝槽2點接觸導軌,極大提升了導軌的耐用性。當然,實際使用年限還與工作環境、負載大小、運行頻率等密切相關。在惡劣環境或高負載、高頻率運行下,需加強維護保養,以確保其長期穩定運行,延長使用壽命。 檢測任務交給直交機械手,準確檢測,發現問題,迅速解決!螺桿型直交機械手多少錢
可將直交機械手視為執行單元,靈活搭配,方便實用!河北自動化直交機械手模組
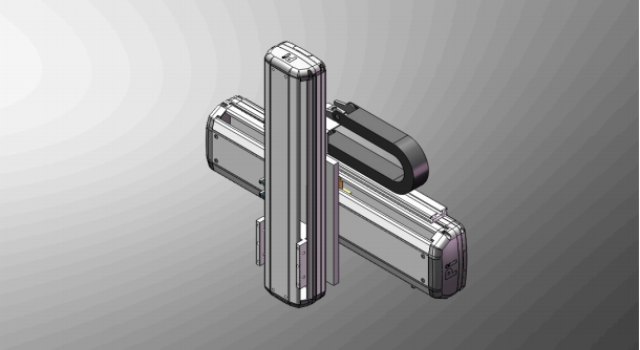
直交機械手的機械結構剖析:直交機械手的機械結構猶如其堅實的骨架,支撐著各項功能的實現。其主體框架通常選用**度的鋁合金或鋼材打造,確保在運行過程中具備***的剛性與穩定性,有效抵御振動與變形。傳動部分常見的有滾珠絲杠和同步帶兩種形式。滾珠絲杠憑借高精度、高負載能力的特性,適用于對定位精度要求嚴苛的作業場景;同步帶則以其高速、低噪音的優勢,在追求高效運行的場合大顯身手。導軌系統如同機械手的“軌道”,保障運動部件平穩順滑地移動,減少摩擦與磨損,延長設備使用壽命。而滑塊、連接件等部件則各司其職,緊密協作,共同構建起直交機械手精密且可靠的機械結構體系。 河北自動化直交機械手模組
- 寧夏模塊化氣脹軸定做價格 2025-12-18
- 山東檢修鋼結構平臺哪家便宜 2025-12-18
- 武漢間歇轉盤噴砂機直銷 2025-12-18
- 廣東動態性能好五軸機床五軸五聯動機行業報價 2025-12-18
- 山東非標定制絕緣套管上漆生產線銷售廠家 2025-12-18
- 寶山區新能源防水型連接電機 2025-12-18
- 上海小麥種子成套設備聯系方式 2025-12-18
- 福建3軸點膠機銷售廠家 2025-12-18
- 安徽硅片平面拋光機價格 2025-12-18
- 循環漿液泵報價 2025-12-18