江門電容模組開發(fā)
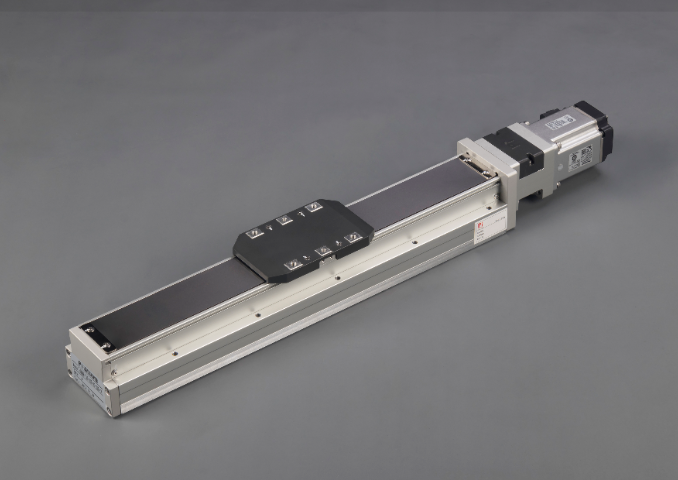
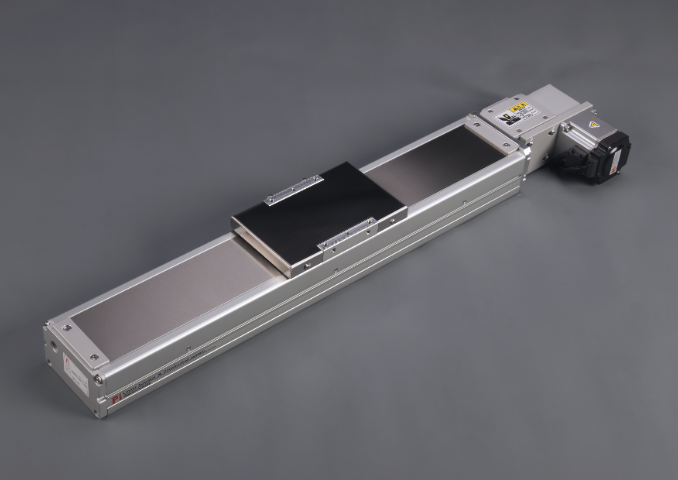
同步帶模組:低成本、長行程的自動化傳動,選擇同步帶模組是自動化設(shè)備中另一種常用的傳動模組。當(dāng)自動化設(shè)備需要進(jìn)行低成本設(shè)計時,同步帶模組是不錯的選擇。它和絲杠模組一樣能實現(xiàn)多點定位,通過控制電機可進(jìn)行無極調(diào)速,并且速度比絲杠模組更快。其結(jié)構(gòu)較為簡單,前后兩端分別有從動軸和主動軸,中間是滑臺,滑臺上安裝皮帶,這一結(jié)構(gòu)使得同步帶模組可進(jìn)行來回水平回轉(zhuǎn),具有速度高、行程大的特點,常用最大行程可達(dá)3米,適合長距離移栽,所以在水平移栽場景中經(jīng)常會采用同步帶模組。對于一些精度要求較低的貼裝設(shè)備、螺絲機、點膠機等也可使用。但需要注意的是,如果要在龍門架上使用同步帶模組,則需要雙邊提供動力,否則容易導(dǎo)致位置偏移。總體而言,同步帶模組在對成本敏感且需要長行程傳動的自動化應(yīng)用中具有明顯優(yōu)勢。 伺服驅(qū)動模組以毫秒級響應(yīng)速度,準(zhǔn)確捕捉操控指令,實現(xiàn)高速運動中的穩(wěn)定輸出。江門電容模組開發(fā)
工時核算(HRA)模塊在生產(chǎn)制造過程中主要負(fù)責(zé)記錄和處理工作與非工作小時,其生成的數(shù)據(jù)對于計算真實工時具有重要意義。工時可以針對生產(chǎn)和服務(wù)單輸入,也能直接針對項目輸入,并且可以針對人或機器進(jìn)行記錄。經(jīng)過處理后,工時被應(yīng)用于進(jìn)程工作(WIP)值。工時的輸入方式較為靈活,可以通過手工輸入,也可在車間作業(yè)控制(SFC)、重復(fù)制造(RPT)和生產(chǎn)管理(PMG)模塊完成報表后,通過反饋或集成時間記錄系統(tǒng)進(jìn)行輸入。同時,小時預(yù)算可以通過工作中心和員工兩者進(jìn)行輸入,這使得將預(yù)算工時與真實工時進(jìn)行比較成為可能。HRA模塊在生產(chǎn)管理中發(fā)揮著重要作用,它為評估生產(chǎn)效率提供了關(guān)鍵數(shù)據(jù)支持,企業(yè)可以根據(jù)這些數(shù)據(jù)分析生產(chǎn)過程中的時間利用情況,找出潛在的效率提升點,優(yōu)化生產(chǎn)流程,合理安排人力和設(shè)備資源,從而提高企業(yè)的整體生產(chǎn)效率和經(jīng)濟效益。 江門電容模組開發(fā)并聯(lián)模組以多支鏈并聯(lián)結(jié)構(gòu)為特點,具有高剛度、高速度的運動性能優(yōu)勢。
半導(dǎo)體制造中的晶圓搬運模組:在半導(dǎo)體制造過程中,晶圓搬運是一個極為關(guān)鍵且頻繁的環(huán)節(jié),晶圓搬運模組承擔(dān)著這一重要任務(wù)。晶圓搬運模組需要具備超高的精度、快速的響應(yīng)速度以及穩(wěn)定可靠的性能。在芯片制造的光刻環(huán)節(jié),晶圓搬運模組要將晶圓準(zhǔn)確地定位在光刻機的工作臺上,其定位精度需達(dá)到納米級,以確保光刻圖案的準(zhǔn)確性,進(jìn)而保證芯片的性能和良品率。通常,晶圓搬運模組采用先進(jìn)的直線電機或高精度絲杠傳動機構(gòu),搭配高性能的控制器和傳感器。傳感器能夠?qū)崟r監(jiān)測晶圓的位置和狀態(tài),一旦出現(xiàn)偏差,控制器立即調(diào)整模組的運動,實現(xiàn)精確補償。隨著半導(dǎo)體制造工藝向更高精度、更大尺寸晶圓方向發(fā)展,晶圓搬運模組將不斷優(yōu)化結(jié)構(gòu)設(shè)計,采用更輕質(zhì)、強度的材料,以提高運動速度和加速度,同時進(jìn)一步提升其精度和穩(wěn)定性。此外,為了適應(yīng)半導(dǎo)體制造車間的潔凈環(huán)境要求,晶圓搬運模組還將在防塵、防靜電等方面進(jìn)行技術(shù)改進(jìn),為半導(dǎo)體制造行業(yè)的持續(xù)發(fā)展提供有力支撐。
生產(chǎn)制造中的AGV驅(qū)動模組:隨著物流和倉儲行業(yè)的快速發(fā)展以及生產(chǎn)制造自動化程度的不斷提高,AGV(自動導(dǎo)引車)在企業(yè)生產(chǎn)和物流環(huán)節(jié)中的應(yīng)用越來越普遍,而AGV驅(qū)動模組則是AGV的重要部件。常見的AGV驅(qū)動模組采用直流電機或交流電機搭配減速機的形式,能夠為AGV提供穩(wěn)定的動力輸出。在電商倉庫中,大量的AGV依靠驅(qū)動模組在貨架間靈活穿梭,實現(xiàn)貨物的自動搬運和存儲。驅(qū)動模組具備良好的速度調(diào)節(jié)性能,可以根據(jù)不同的工作場景和任務(wù)要求,準(zhǔn)確操控AGV的行駛速度,確保其安全、高效地運行。同時,驅(qū)動模組的可靠性至關(guān)重要,它需要能夠適應(yīng)長時間、高難度的工作,減少故障發(fā)生的概率,降低企業(yè)的運營維護(hù)成本。未來,AGV驅(qū)動模組將朝著更高功率密度、更準(zhǔn)確的運動控制以及更強的智能化方向發(fā)展,例如集成先進(jìn)的傳感器,實現(xiàn)對AGV運行狀態(tài)的實時監(jiān)測和自我診斷,與企業(yè)的智能物流管理系統(tǒng)深度融合,進(jìn)一步提升整個物流系統(tǒng)的智能化水平和運作效率。 同步帶模組憑借傳動速度快、噪音低的優(yōu)勢,常用于物料輸送線的長距離傳動環(huán)節(jié)。
模組的起源之通信模組:通信模組的起源與通信技術(shù)的變革息息相關(guān)。在通信發(fā)展的初期,設(shè)備之間的通信連接較為復(fù)雜,需要大量的定制化電路和軟件來實現(xiàn)。隨著通信技術(shù)從模擬向數(shù)字的轉(zhuǎn)變,以及不同通信標(biāo)準(zhǔn)如2G、3G等的逐步確立,為了降低通信設(shè)備開發(fā)的難度和成本,模組化的理念開始引入。廠商將通信所需的關(guān)鍵功能,如基帶處理、射頻收發(fā)等集成在一個模塊中,形成了**初的通信模組。這些早期的通信模組雖然功能相對有限,*能滿足基本的語音通信和低速率數(shù)據(jù)傳輸需求,但它們?yōu)楹罄m(xù)通信模組的發(fā)展奠定了基礎(chǔ),開啟了通信設(shè)備模塊化、標(biāo)準(zhǔn)化的進(jìn)程,使得更多設(shè)備能夠便捷地實現(xiàn)通信功能。 自動化模組融入智能控制技術(shù),自主規(guī)劃路徑,準(zhǔn)確執(zhí)行任務(wù),開啟智能制造新篇!江門電容模組開發(fā)
振動模組通過偏心塊旋轉(zhuǎn)產(chǎn)生振動,常用于物料的篩分或輸送過程中的防堵塞處理。江門電容模組開發(fā)
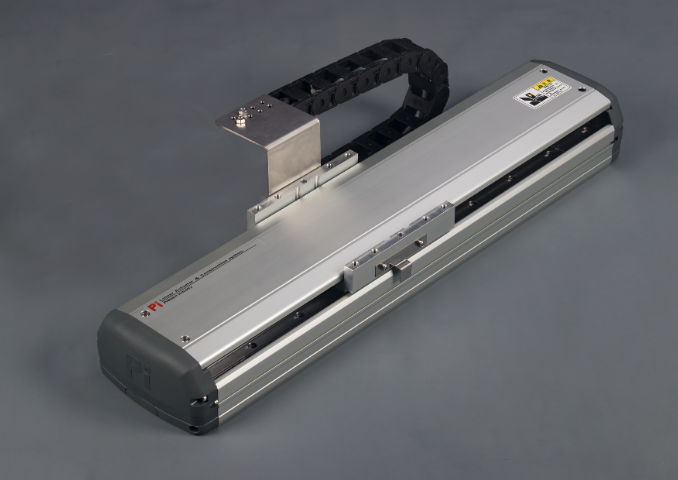
模組的基本構(gòu)造:自動化設(shè)備中的模組通常由多個關(guān)鍵部分組成。以常見的直線模組為例,其**構(gòu)成包括傳動部件、導(dǎo)向部件、支撐結(jié)構(gòu)以及動力裝置。傳動部件如滾珠絲杠,通過螺桿的旋轉(zhuǎn)將回轉(zhuǎn)運動轉(zhuǎn)化為直線運動,具有高精度、高剛性的特點,廣泛應(yīng)用于對定位精度要求較高的設(shè)備,像貼裝設(shè)備、高精度螺絲機等。導(dǎo)向部件一般采用直線導(dǎo)軌,確保運動的平穩(wěn)性和準(zhǔn)確性,減少運動過程中的偏差。支撐結(jié)構(gòu)多采用鋁型材或鋼材,為其他部件提供穩(wěn)定的安裝基礎(chǔ),鋁型材因其質(zhì)量輕、強度高且具有良好的散熱性能,在很多模組中得到大量應(yīng)用。動力裝置則根據(jù)不同需求,可選用電機、氣缸等,電機能實現(xiàn)精確的速度和位置控制,而氣缸成本較低,適用于一些對精度要求不高、只需簡單兩點定位的場景。 江門電容模組開發(fā)
- 吉林模組模具廠家 2025-12-09
- 廣州安裝模組多少錢 2025-12-09
- 繼電器模組哪家好 2025-12-09
- 福建模組定制服務(wù) 2025-12-09
- 重慶模組模組 2025-12-09
- 江蘇傳感器模組工廠 2025-12-09
- 汕頭模組 2025-12-08
- 江蘇模組多少錢 2025-12-08
- 佛山迷你型模組廠家 2025-12-08
- 廣州安裝模組定制服務(wù) 2025-12-08
- 寧夏模塊化氣脹軸定做價格 2025-12-18
- 山東檢修鋼結(jié)構(gòu)平臺哪家便宜 2025-12-18
- 武漢間歇轉(zhuǎn)盤噴砂機直銷 2025-12-18
- 廣東動態(tài)性能好五軸機床五軸五聯(lián)動機行業(yè)報價 2025-12-18
- 山東非標(biāo)定制絕緣套管上漆生產(chǎn)線銷售廠家 2025-12-18
- 寶山區(qū)新能源防水型連接電機 2025-12-18
- 上海小麥種子成套設(shè)備聯(lián)系方式 2025-12-18
- 福建3軸點膠機銷售廠家 2025-12-18
- 安徽硅片平面拋光機價格 2025-12-18
- 循環(huán)漿液泵報價 2025-12-18