湖北直交機械手模組
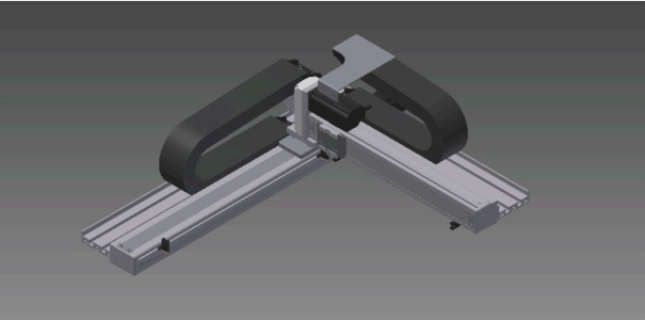
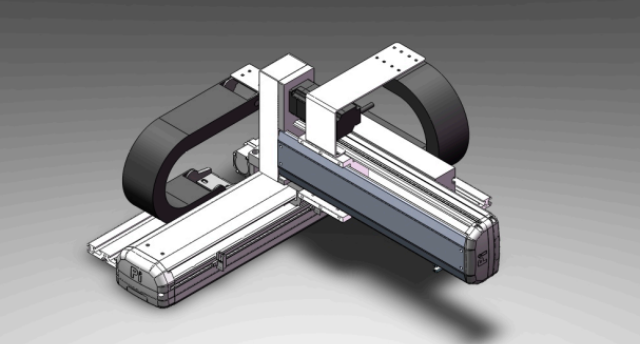
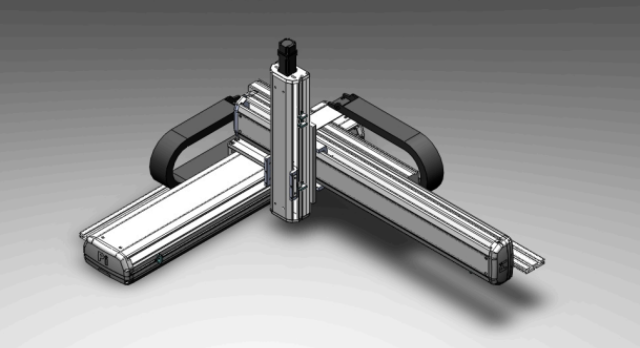
直交機械手通常由X、Y、Z三個軸組成,通過這三個軸的協同運動,實現機械手在三維空間內的精確定位。其結構設計遵循直角坐標系原理,各軸相互垂直,使得運動路徑清晰、簡單,便于編程與控制。以常見的懸臂式直交機械手為例,X軸一般負責水平方向的左右移動,Y軸實現前后位移,Z軸則完成垂直方向的升降動作。這種結構設計使得機械手能夠靈活地在工作區域內穿梭,準確地到達目標位置,廣泛應用于各類自動化生產線,如電子制造中的元件貼片、機械加工中的物料搬運等場景,為高效生產提供了基礎保障。直交機械手的構造包含多個關鍵組件。滾珠絲桿是實現高精度直線運動的重要部件,它將回轉運動轉化成直線運動或將直線運動轉化為回轉運動,具有高精度、高效率、高剛性等特點。直線導軌則為機械手的運動提供精確導向,保證運動的平穩性和重復性,能有效承受來自不同方向的載荷。強度高的鋁合金型材構成了機械手的框架主體,其質量輕、強度高,既降低了整體重量,利于提高運動速度,又確保了結構的穩定性。此外,聯軸器用于連接電機與絲桿等部件,傳遞扭矩,保障動力的有效傳輸,這些組件協同工作,賦予了直交機械手良好的性能。 由單軸機械手合理組合的直交機械手,結構穩固,性能出色!湖北直交機械手模組
直交機械手的精度控制技術精度是直交機械手的關鍵性能指標之一。為實現高精度控制,一方面在機械結構上采用高精度的滾珠絲桿、直線導軌等部件,并嚴格控制加工精度和裝配精度,減少機械間隙帶來的誤差。另一方面,在控制系統中運用先進的算法和傳感器技術。例如,通過高精度的編碼器實時監測電機的旋轉角度,進而精確計算機械手的位置,當檢測到位置偏差時,控制系統迅速做出調整,確保機械手始終按照預設軌跡運動。此外,還可采用誤差補償技術,對機械結構的固有誤差以及運行過程中因溫度變化、負載變化等因素產生的誤差進行補償,從而進一步提高直交機械手的定位精度,滿足對精度要求極高的應用場景,如精密儀器制造、生物醫療設備生產等。 中國臺灣十字型中負載直交機械手哪家好高可靠性與耐久性的直交機械手,帶高剛性框架,歷經考驗,毫不退縮!
直交機械手在汽車制造業的應用實例:汽車制造業是一個高度自動化的行業,直交機械手在其中扮演著不可或缺的角色。在汽車零部件的生產過程中,直交機械手常用于物料搬運與加工環節。例如,在沖壓車間,機械手能夠快速、準確地將鋼板送入沖壓機,完成沖壓成型后,又能及時將沖壓件搬運至下一工序,實現生產流程的高效銜接。在汽車焊接領域,直交機械手可搭載焊接工具,對汽車車身的各個部件進行精確焊接,保證焊接質量的穩定性與一致性。此外,在汽車裝配線上,機械手能夠準確地抓取并安裝各類汽車零部件,如發動機、座椅、儀表盤等,大幅縮短汽車的裝配時間,提高生產效率,同時降低人工勞動強度,為汽車制造業的大規模、高質量生產提供有力支持。
直交機械手在醫療行業的應用挑戰與解決方案:醫療行業對設備的精度、可靠性以及安全性要求極高,直交機械手在該領域的應用面臨諸多挑戰。首先,醫療環境對設備的潔凈度要求苛刻,直交機械手需要具備良好的防塵、防細菌設計,以防止細菌滋生與傳播。為此,可采用特殊的表面處理工藝,使機械手表面光滑且不易吸附灰塵與細菌,同時在結構設計上減少易積塵的縫隙與角落。其次,醫療操作往往涉及高精度的動作,如微創手術中的器械操作,這對機械手的定位精度與運動穩定性提出了極高要求。通過采用更高精度的傳感器、優化控制算法以及提升機械結構的剛性等措施,能夠有效提高機械手的精度與穩定性。此外,醫療設備的安全性至關重要,直交機械手需要配備多重安全防護裝置,如急停按鈕、安全光幕等,確保在使用過程中不會對醫護人員與患者造成傷害。 針對應用提供靈活的直交機械手重要零配件搭配方案,滿足需求!
直交機械手的發展起源:直交機械手的發展可追溯到上世紀工業自動化興起的時期。早期,工業生產對自動化設備的需求逐漸增長,簡單的直線運動機構開始出現,它們為直交機械手的誕生奠定了基礎。隨著機械制造工藝的進步以及電子技術的發展,**初的直交機械手雛形開始形成,其結構相對簡單,功能也較為單一,主要應用于一些對精度和速度要求不高的生產環節。但這些早期嘗試為后續的技術革新積累了寶貴經驗。進入20世紀后期,隨著計算機技術和傳感器技術的融入,直交機械手迎來了快速發展階段,精度、速度和可靠性得到大幅提升,應用領域也不斷拓展,從**初的簡單物料搬運逐步涉足到精密裝配、檢測等復雜生產流程。 于高速高精度重復搬運任務里,直交機械手游刃有余,高效快捷!甘肅三抽直交機械手
擁有機器人視覺和力度感知的直交機械手,準確操作,適應復雜環境!湖北直交機械手模組
直交機械手的工作基于電機驅動和控制系統的協同運作。當接收到外部指令后,控制器依據預設的程序,向電機發送相應的脈沖信號。以X軸電機為例,電機在接收到脈沖信號后開始旋轉,通過滾珠絲杠或同步帶等傳動裝置,將旋轉運動轉化為沿X軸方向的直線運動,帶動安裝在該軸上的滑塊及負載做直線位移。同理,Y軸和Z軸電機按照指令完成各自方向的運動,從而實現機械手在三維空間內的精確定位和復雜動作。在運動過程中,傳感器持續監測各軸的實際位置和運動狀態,并將這些信息反饋給控制器。若實際位置與指令位置存在偏差,控制器會迅速調整電機的運轉參數,使機械手回到正確的運動軌跡,確保每一次操作都能達到極高的精度要求,滿足半導體等高精度行業的生產需求。 湖北直交機械手模組
- 武漢間歇轉盤噴砂機直銷 2025-12-18
- 廣東動態性能好五軸機床五軸五聯動機行業報價 2025-12-18
- 山東非標定制絕緣套管上漆生產線銷售廠家 2025-12-18
- 寶山區新能源防水型連接電機 2025-12-18
- 上海小麥種子成套設備聯系方式 2025-12-18
- 福建3軸點膠機銷售廠家 2025-12-18
- 安徽硅片平面拋光機價格 2025-12-18
- 循環漿液泵報價 2025-12-18
- 大型建筑材料的質量檢測哪家強 2025-12-18
- 黑龍江立柱式超聲波焊接設備 2025-12-18