甘肅十字型中負載直交機械手模組
隨著工業(yè)自動化技術(shù)的不斷發(fā)展,直交機械手也呈現(xiàn)出一系列新的發(fā)展趨勢。首先,智能化程度將不斷提高,通過引入人工智能、機器學習等技術(shù),使機械手能夠具備自主決策、自適應調(diào)整的能力,更好地適應復雜多變的生產(chǎn)環(huán)境。其次,高精度、高速度和高負載能力將進一步提升,以滿足日益增長的高質(zhì)量制造業(yè)需求。在結(jié)構(gòu)設(shè)計方面,將更加注重輕量化和緊湊化,以節(jié)省安裝空間和降低能耗。同時,直交機械手與其他自動化設(shè)備的協(xié)同工作能力將不斷增強,實現(xiàn)生產(chǎn)過程的全自動化和智能化集成。此外,隨著物聯(lián)網(wǎng)技術(shù)的發(fā)展,直交機械手將能夠?qū)崿F(xiàn)遠程監(jiān)控和管理,提高設(shè)備的運維效率。未來,直交機械手將在工業(yè)生產(chǎn)、物流倉儲、各類服務等更多領(lǐng)域發(fā)揮更大的作用,推動各行業(yè)向智能化、高時效化方向發(fā)展。 運動元件驅(qū)動直交機械手手臂運動,動力強勁,運轉(zhuǎn)高效!甘肅十字型中負載直交機械手模組
直交機械手在電子制造領(lǐng)域的應用:在電子制造行業(yè),直交機械手發(fā)揮著不可替代的作用。電子元件的生產(chǎn)和組裝對精度要求極高,以手機主板貼片生產(chǎn)為例,直交機械手能夠精確地將微小的電子元件,如電阻、電容、芯片等,貼裝到印刷電路板(PCB)上。它通過高精度的視覺識別系統(tǒng),快速準確地定位元件位置,然后利用X、Y、Z軸的協(xié)同運動,將元件準確放置在指定焊盤上,確保元件貼裝位置誤差控制在極小范圍內(nèi),極大地提高了產(chǎn)品的良品率。在液晶面板生產(chǎn)中,直交機械手負責搬運、切割、檢測等多項工作,其高速、穩(wěn)定的運行特性,滿足了電子制造行業(yè)對生產(chǎn)效率和產(chǎn)品質(zhì)量的嚴格要求,助力電子制造企業(yè)實現(xiàn)高效、精密的自動化生產(chǎn)。 河南懸臂型中負載直交機械手廠家針對應用提供靈活的直交機械手重要零配件搭配方案,滿足需求!
直交機械手與協(xié)作機器人的對比與協(xié)同應用:直交機械手與協(xié)作機器人在工業(yè)自動化領(lǐng)域各有特點,二者既存在差異又可協(xié)同應用。直交機械手通常具備較高的負載能力與定位精度,適用于大規(guī)模、重復性強的工業(yè)生產(chǎn)任務,如汽車制造、電子加工等行業(yè)的物料搬運與加工操作。而協(xié)作機器人則更注重與人的安全協(xié)作,其柔性關(guān)節(jié)與智能傳感器能夠使其在與人近距離接觸時自動降低速度或停止運動,保障人員安全。協(xié)作機器人常用于需要人機互動的場景,如產(chǎn)品裝配、質(zhì)量檢測等環(huán)節(jié)。在實際生產(chǎn)中,直交機械手與協(xié)作機器人可實現(xiàn)協(xié)同作業(yè)。例如,在電子產(chǎn)品的生產(chǎn)線上,直交機械手負責將大型零部件搬運至裝配區(qū)域,協(xié)作機器人則在操作人員的協(xié)助下完成精細的裝配工作,二者優(yōu)勢互補,共同提高生產(chǎn)效率與產(chǎn)品質(zhì)量,為企業(yè)帶來更高效、靈活的自動化生產(chǎn)解決方案。
在醫(yī)療設(shè)備制造領(lǐng)域,直交機械手發(fā)揮著至關(guān)重要的作用。醫(yī)療設(shè)備的制造對精度和潔凈度要求近乎苛刻,直交機械手能夠在無塵、無菌的環(huán)境中準確作業(yè)。在醫(yī)療器械的組裝過程中,機械手可將微小的零部件準確安裝至相應位置,確保醫(yī)療器械的性能穩(wěn)定可靠。例如,在心臟起搏器等精密醫(yī)療器械的生產(chǎn)中,直交機械手的高精度操作能夠有效避免人工組裝可能產(chǎn)生的誤差,提高產(chǎn)品質(zhì)量與安全性。在醫(yī)療檢測設(shè)備中,直交機械手可實現(xiàn)樣本的自動抓取與轉(zhuǎn)移,提升檢測效率與準確性,為醫(yī)療設(shè)備制造行業(yè)的發(fā)展注入強大動力,推動醫(yī)療技術(shù)不斷進步。 滾輪導軌運動機構(gòu),承載能力強,剛性佳,值得信賴!
直交機械手的控制系統(tǒng)是其重要部分,負責對機械手的運動進行精確控制和管理。該系統(tǒng)通常由控制器、驅(qū)動器、傳感器以及控制軟件等組成。控制器作為整個系統(tǒng)的大腦,接收來自外部設(shè)備的指令和傳感器反饋的信息,并根據(jù)預設(shè)的控制算法生成控制信號,發(fā)送給驅(qū)動器。驅(qū)動器則根據(jù)控制器的信號,驅(qū)動電機運轉(zhuǎn),從而實現(xiàn)機械手的運動控制。傳感器實時監(jiān)測機械手的位置、速度、加速度等參數(shù),并將這些信息反饋給控制器,以便進行實時調(diào)整和優(yōu)化。控制軟件則為用戶提供了一個友好的操作界面,用戶可以通過編程的方式設(shè)置機械手的運動軌跡、速度、加速度等參數(shù),實現(xiàn)不同的工作任務。先進的控制系統(tǒng)還具備故障診斷和報警功能,能夠及時發(fā)現(xiàn)并解決系統(tǒng)故障,保證機械手的正常運行。 汽車行業(yè)中,直交機械手發(fā)揮重要作用,參與制造,品質(zhì)保障!浙江直交機械手價格
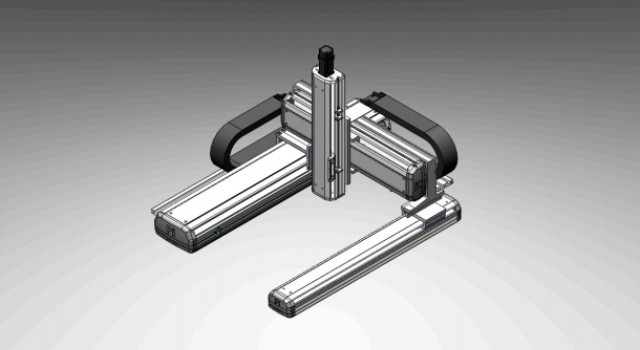
Z 軸可機械鎖止的直坐標機械手,防止掉落,保障安全!甘肅十字型中負載直交機械手模組
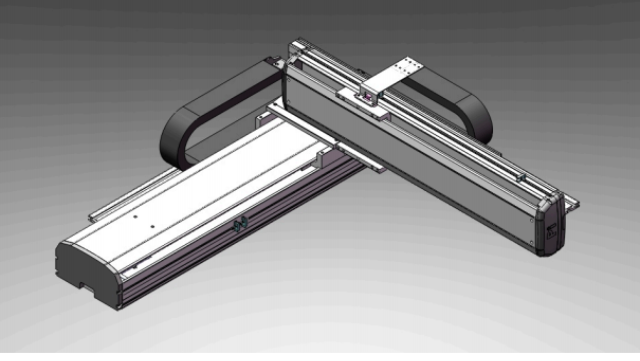
直交機械手的結(jié)構(gòu)主要包括機械臂、導軌、滑塊、支架以及驅(qū)動和傳動裝置等部分。機械臂是機械手的主體結(jié)構(gòu),負責承載和搬運工作對象,通常采用**度鋁合金或鋼材制成,以保證足夠的強度和剛性。導軌和滑塊則為機械臂的運動提供導向和支撐,確保機械臂能夠沿著直線平穩(wěn)地移動。支架用于固定整個機械手系統(tǒng),使其能夠穩(wěn)固地安裝在工作臺上或生產(chǎn)線上。驅(qū)動裝置如電機為機械手的運動提供動力,傳動裝置將電機的旋轉(zhuǎn)運動傳遞給機械臂,實現(xiàn)直線運動。此外,還配備了各種傳感器,如位置傳感器、力傳感器等,用于監(jiān)測機械手的運行狀態(tài)和工作環(huán)境,為控制系統(tǒng)提供反饋信息,使機械手能夠更加智能、精確地完成工作任務。 甘肅十字型中負載直交機械手模組
- 福建3軸點膠機銷售廠家 2025-12-18
- 大型建筑材料的質(zhì)量檢測哪家強 2025-12-18
- 惠山區(qū)本地散熱手機殼生產(chǎn)廠家 2025-12-18
- 虹口區(qū)多功能攪拌機 2025-12-18
- 上海附近智能濾油機銷售方法 2025-12-18
- 嘉定區(qū)國內(nèi)掃描儀廠家現(xiàn)貨 2025-12-18
- 遼寧機械主軸廠家電話 2025-12-18
- 安徽藍牙耳機注塑機哪家好 2025-12-18
- 現(xiàn)代minimo售后服務 2025-12-18
- 相城區(qū)自動周轉(zhuǎn)模殼五星服務 2025-12-18