江門高精度模組設置
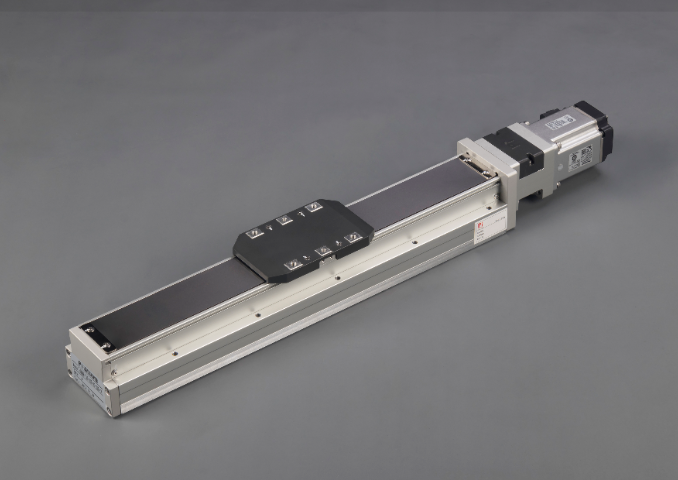
模組的起源之通信模組:通信模組的起源與通信技術的變革息息相關。在通信發展的初期,設備之間的通信連接較為復雜,需要大量的定制化電路和軟件來實現。隨著通信技術從模擬向數字的轉變,以及不同通信標準如2G、3G等的逐步確立,為了降低通信設備開發的難度和成本,模組化的理念開始引入。廠商將通信所需的關鍵功能,如基帶處理、射頻收發等集成在一個模塊中,形成了**初的通信模組。這些早期的通信模組雖然功能相對有限,*能滿足基本的語音通信和低速率數據傳輸需求,但它們為后續通信模組的發展奠定了基礎,開啟了通信設備模塊化、標準化的進程,使得更多設備能夠便捷地實現通信功能。 皮帶模組通過張緊裝置調節皮帶松緊度,可以避免傳動過程中出現打滑現象。江門高精度模組設置
醫療器械中的康復訓練模組:隨著人們對健康重視程度的提高以及老齡化社會的加劇,康復醫療市場需求日益增長,康復訓練模組在其中發揮著重要作用。康復訓練模組通常集成了多種傳感器和智能控制系統,能夠根據患者的康復需求和身體狀況制定個性化的訓練方案。在腦卒中患者的康復訓練中,下肢康復訓練模組可以模擬行走動作,通過電機驅動患者的腿部進行屈伸運動,同時傳感器實時監測患者腿部的運動數據,如運動幅度、力量等,并將這些數據反饋給控制系統。控制系統根據預設的康復目標和患者的實際情況,實時調整訓練參數,如運動速度、阻力大小等,實現精細的康復訓練。上肢康復訓練模組則可以幫助患者進行手臂的伸展、抓握等動作訓練,恢復上肢的運動功能。未來,康復訓練模組將更加智能化,與大數據、云計算技術相結合,能夠對大量患者的康復數據進行分析,為醫生提供更科學的康復***建議。同時,康復訓練模組將朝著小型化、便攜化方向發展,方便患者在家中進行康復訓練,提高康復***的可及性。 廣州封閉式模組多少錢復合模組集成多種運動功能,可在同一設備中實現直線、旋轉等多類型動作切換。
半導體傳感器模組在物聯網、智能設備等領域發揮著重要作用。以智能手機中的加速度計和陀螺儀組成的慣性測量單元(IMU)傳感器模組為例,它能實時感知手機的運動狀態。在手機游戲中,玩家通過晃動手機來控制游戲角色的動作,IMU傳感器模組會精確捕捉手機的加速度和角度變化,并將這些數據傳輸給手機處理器,處理器根據這些數據調整游戲畫面中角色的動作,為玩家帶來沉浸式的游戲體驗。在智能汽車領域,雷達傳感器模組是自動駕駛系統的重要組成部分。例如,博世的毫米波雷達傳感器模組,通過發射和接收毫米波信號,能夠精確測量車輛周圍物體的距離、速度和角度。在自動駕駛過程中,傳感器模組不斷收集周邊環境信息,并將數據傳輸給汽車的**控制系統。系統根據這些數據判斷車輛是否需要加速、減速或轉向,從而保障行車安全,推動自動駕駛技術的發展。
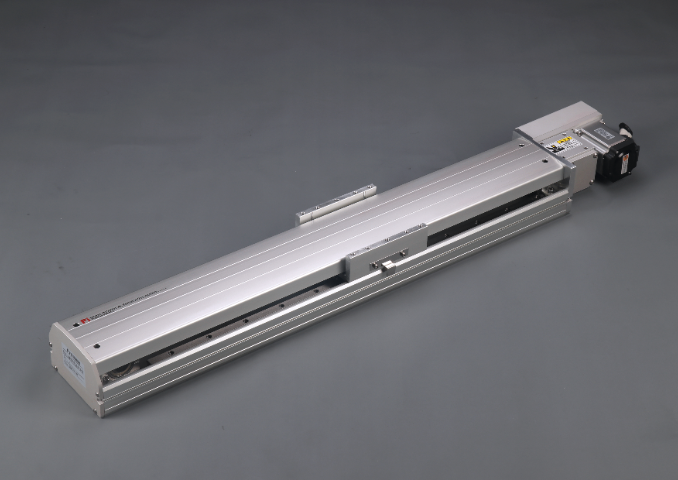
模組未來發展面臨的挑戰:盡管模組發展前景廣闊,但也面臨一些挑戰。一方面,隨著應用領域對模組性能要求的不斷提高,如在超精密加工領域對納米級精度的需求,現有的技術水平可能難以滿足,需要企業加大研發投入,突破技術瓶頸。另一方面,市場競爭日益激烈,不僅有來自國際品牌的競爭壓力,國內企業之間也存在價格戰等不良競爭現象,這對企業的盈利能力和持續發展能力提出了考驗。此外,原材料價格的波動也會影響模組的生產成本,如何在保證產品質量的前提下,有效控制成本,也是企業需要解決的問題。模組的未來發展趨勢展望:展望未來,模組將繼續在自動化設備領域發揮**作用。隨著智能制造的深入推進,模組的應用領域將進一步拓寬,不僅在傳統制造業中得到更廣泛的應用,還將在新興產業如新能源汽車制造、人工智能設備等領域展現出巨大的潛力。在技術上,高精高速、高可靠性、輕量化以及智能化仍將是主要發展方向,產品將更加注重個性化定制,以滿足不同客戶的多樣化需求。同時,隨著國內企業技術水平的不斷提升,國產化率有望進一步提高,在國際市場上的競爭力也將不斷增強,與國際品牌共同推動模組行業的持續發展。 電動缸模組將電機旋轉運動轉化為直線運動,兼具高精度與大推力的雙重性能。
模組的起源之自動識別模組:自動識別領域的模組起源與科技發展緊密相連。在早期,隨著計算機技術和自動化需求的萌芽,一維條碼掃描模組開始出現。當時,商業領域對于商品信息快速準確錄入的需求日益增長,傳統的手工記錄方式效率低下且容易出錯。一維條碼應運而生,而能讀取這些條碼信息的掃描模組也隨之誕生。它剛開始的設計較為簡單,功能也相對單一,只能識別特定格式的條碼,并且在讀取速度和準確性上還有很大提升空間。但這一創新開啟了自動識別的先河,為后續二維條碼掃描模組等更先進產品的研發奠定了基礎。隨著“物聯網”概念的興起和相關技術的逐步成熟,自動識別模組迎來了更廣闊的發展空間,從開始簡單的條碼識別向更復雜、多元的信息采集和處理方向邁進。 真空吸附模組通過準確負壓操控,安全抓取易碎工件,應用于電子自動化產線。江門高精度模組工廠
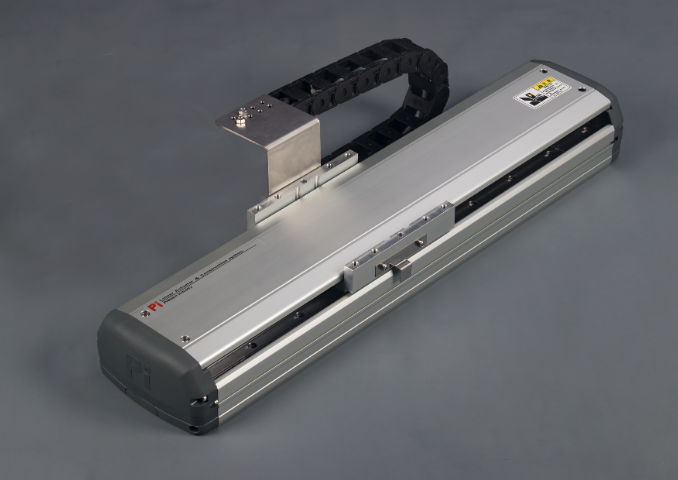
緊湊型模組節省安裝空間,特別適用于小型自動化設備的精密傳動需求。江門高精度模組設置
從發展歷程來看,自動化模組從**初較為簡單的結構,逐步向高精度、高速度、高負載能力方向發展。早期的自動化模組在精度和速度上存在較大局限,*能滿足一些對精度要求不高的簡單生產場景。隨著制造工藝的提升以及材料科學的進步,滾珠絲桿、直線導軌等關鍵部件的精度不斷提高,使得自動化模組的整體精度得以大幅提升。例如,絲桿從普通精度發展到如今高精度研磨級,精度可達微米甚至亞微米級別。同時,驅動技術也不斷革新,從傳統的電機驅動發展到伺服電機驅動,伺服電機能夠實現更精細的速度和位置控制,使自動化模組運行速度更快、響應更迅速。在負載能力方面,通過改進結構設計以及采用**度材料,自動化模組能夠承載更重的負載,滿足更多復雜工業場景的需求。 江門高精度模組設置
- 常州常規CZU型鋼設備報價 2025-12-18
- 一體化成型打彎 2025-12-18
- 楊浦區環保離心機 2025-12-18
- 浦口區本地波峰焊接 2025-12-18
- 重慶直銷四邊封包裝機哪個品牌好 2025-12-18
- 江蘇常州金旺定制設備 2025-12-18
- 湖南室外框架電梯費用 2025-12-18
- 溫州大型離心通風機什么價格 2025-12-18
- 廣東節溫器源頭直供 2025-12-18
- 東莞自動稱重剔除機現貨 2025-12-18