山西小孔內壁堆焊機頭
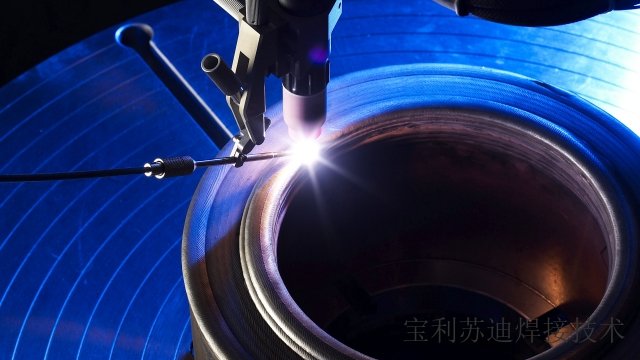
寶利蘇迪自動堆焊設備焊接電源PC600-3包括逆變電源、TIGer輸出控制模塊、熱絲模塊和功能軸控制模塊,為整個焊接系統提供水電氣供應和各種控制信號的處理:焊接電流輸出控制、熱絲電流輸出控制、控制焊槍AVC跟蹤,擺動,送絲和聯動配套設備驅動工件旋轉等焊接動作,是整套系統的主要。輸入電壓:三相交流,輸出焊接電流范圍:5-550A。可控制軸:電流軸,機頭運動軸,送絲軸,AVC電弧電壓自動控制軸,擺動軸,供電軸,多功能軸等。內置程序數量:100個。編程方式:PC電腦,遙控器線長:15米。寶利蘇迪雙鎢極堆焊焊槍的電流容量大,并具有熱絲功能,焊接效率極高。山西小孔內壁堆焊機頭

寶利蘇迪TIG鎢極氬弧堆焊設備可以對精確參數進行編程:堆焊速度、電流、電壓、送絲速度和預熱溫度,可以更好地控制稀釋率,從而保證熔敷物的正確化學成分。TIG自動鎢極氬弧堆焊的可實現全位置焊,來處理不適合平焊位置的工件。TIG管道氬弧堆焊由于工藝的靈活性,可以選擇在非常寬的能量范圍內工作,焊接電流調節范圍廣。可選擇多焊炬或多送絲機構來實現生產力的提高,且不會影響操作性和熔敷質量。在TIG自動鎢極氬弧堆焊中,TIG焊的所有常規功能仍然完全適用(AVC,擺動,與焊接電流同步運動等)。海南自動耐腐蝕堆焊設備生產廠家寶利蘇迪堆焊焊槍配有尾氣拖罩,具有氣體過濾和穩流功能,保證熔池在冷卻過程中也可獲得良好保護效果。
寶利蘇迪POLYSOUDE自動氬弧堆焊設備包含水平回轉臺,滿足筒體及法蘭的裝卡,固定,定位,滿足筒體密封面及法蘭密封面全部堆焊區域的堆焊需求。水平回轉臺包含底座,回轉驅動裝置,工作臺,導電裝置,潤滑系統,控制系統等組件。焊接回轉平臺需要滿足承重要求。底座重心穩定,具有較好的剛性,保證長期使用不變形。回轉驅動需具備一定范圍內的無極調速功能。工作臺由碳素鋼焊接成形并熱處理后加工,臺面有放射狀的T形槽,用于安裝工件調心調平和固定位置。臺面留有中心孔,用于線纜和氣管布置通道。防止電纜纏繞,有焊接地線轉動滑環機構。
管道氬弧堆焊需要多層熔敷,通常是兩層,但對于某些關鍵行業來說可能需要三層以上。在此過程中,稀釋的控制非常重要。稀釋率過高可能導致裂紋或組織轉變(如奧氏體轉馬氏體)。管道氬弧堆焊遇到的主要困難是控制稀釋率,以保證熔敷物的化學成分。實際上,用于堆焊的合金大多情況下只有在非稀釋條件才能保證性能,這意味著需要保持與等級分類相對應的化學成分。然而,焊接操作時,填充焊絲完全熔化并沉積在母材上,母材在電弧的影響下本身也發生了熔化。堆焊操作后形成的稀釋率是由填充金屬和母材的混合物來定義的。在熔化*少量的母材與確保母材與熔敷層結合質量之間尋找折衷方案仍然是工藝的主要難點,需要在熔敷層的致密性和化學成分之間取得平衡。寶利蘇迪自動堆焊設備控制系統能滿足焊接速度,氣體流量,電弧長度,電流,擺動,弧壓跟蹤等的聯動控制。
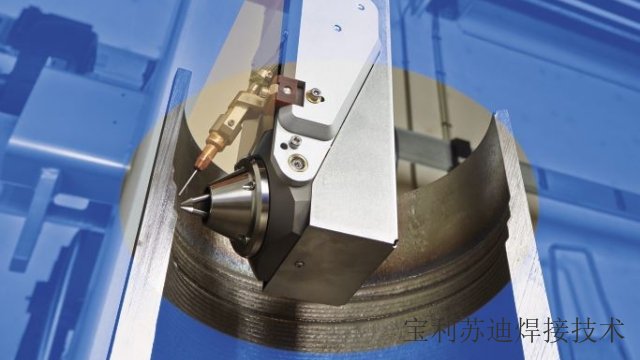
·寶利蘇迪另外一種主要的堆焊形式為垂直堆焊,例如彎頭內壁堆焊,三通,法蘭,閥門TIG堆焊等。為垂直位置(2G)而設計的解決方案通常是用來堆焊圓柱形部件。大多數情況下工件由轉臺或變位機定位,針對這些應用,POLYSOUDE寶利蘇迪焊接技術設計出了一系列的無限回轉焊接和堆焊機頭,無限旋轉機頭分為上部旋轉機構部分和下部焊接機構部分:旋轉機構與操作架安裝板連接固定不動;焊接機構部分分為焊接各項功能的執行機構,由旋轉機構驅動旋轉。無限旋轉機頭實現無限制連續焊接。寶利蘇迪旋轉頭架用于在焊接過程中夾持工件,并帶動工件進行旋轉運動。遼寧自動氬弧堆焊機器人
寶利蘇迪堆焊設備送絲裝置包括送絲電機,焊絲盤支架,送絲導管,熱絲導電桿,導絲嘴等。山西小孔內壁堆焊機頭
寶利蘇迪自動堆焊機器人設備可用于接管內壁堆焊,管子表面堆焊,端面堆焊,該自動堆焊設備采用機器人將TIG焊堆焊機頭送至指定位置,采用編程控制或根據待焊工件的形狀自主規劃堆焊路徑,機器人可實現回轉、直道及擺動焊接,可實現接管內壁環向規則區域、不規則區域、對稱區域及非對稱區域的堆焊,可實現接管端面,表面的堆焊及筒體外壁堆焊。自動堆焊機器人的操作及運轉空間能滿足典型工件操作工位的要求,堆焊機器人活動軸不少于6軸。自動堆焊機器人的控制系統具有安全功能,具有緊急停止,自動模式停止,測試模式停止等。機器人具有監控系統,主要包括堆焊機器人本體和堆焊設備監控。山西小孔內壁堆焊機頭
- 云南自動氬弧管板機器人TIG堆焊單元 2025-12-19
- 山東堆焊機器人焊接系統 2025-12-19
- 自動熱絲TIG窄間隙焊接機器人管對管板焊接設備 2025-12-19
- 甘肅自動堆焊機器人窄間隙焊機 2025-12-19
- 廣東自動TIG焊接機器人焊接系統 2025-12-19
- 黑龍江換熱管與管板焊接機器人自動焊接成套設備 2025-12-19
- 廣東管板機器人焊接設備 2025-12-19
- 山西窄間隙焊接機器人管板焊機 2025-12-19
- 吉林管子管板焊接機器人設備 2025-12-19
- 山東J型坡口自動TIG焊接機器人管板焊機 2025-12-19
- 金華燃氣控制閥維修便宜 2025-12-19
- 安徽輕型氣脹軸費用 2025-12-19
- 崇明區便宜的消防材料檢測哪家強 2025-12-19
- 上海測試實驗臺 2025-12-19
- 廣元真空鍍膜設備哪家好 2025-12-19
- 南京工具磨床廠家報價 2025-12-19
- 河北高轉速齒輪泵推薦廠家 2025-12-19
- 天津儲能電源逆變板測試 2025-12-19
- 成都SMT推拉力機報價 2025-12-19
- 深圳污水處理減速機公司 2025-12-19