河北防腐堆焊機
寶利蘇迪自動氬弧堆焊設備可用于蒸發器、換熱器管板耐腐蝕堆焊。該耐腐蝕堆焊設備,管板堆焊機器人設備包含焊接機頭,電源,機器人,操作架,地軌,會轉臺以及焊縫激光清洗設備。水平回轉臺可參與機器人編程聯動。堆焊機器人采用六軸工業機器人,搭配操作架,能精確定位焊槍位置,實現任意位置的焊接堆焊。該堆焊設備配備了智能焊接系統,熔池檢測系統,焊縫清理系統及集中控制系統。焊接方法:雙鎢極熱絲TIG焊。堆焊材料:不銹鋼或鎳基合金。寶利蘇迪無限回轉堆焊機頭SPX分為上部旋轉機構和下部焊接機構。可實現無限制連續焊接。河北防腐堆焊機

還有其他更復雜的情況,由于工件的尺寸和重量,或者**因為它們的幾何形狀(例如,實心工件或長方形工件上的鉆孔),不可能使工件運動。帶無限旋轉機構的軌道式焊接機頭是寶利蘇迪POLYSOUDE專門為焊炬可以在不扭曲電纜/水氣線束的情況下旋轉而設計的。這些機器可以高度自動化地處理固定工件上的堆焊操作。如傳統軌道式機頭一樣,自動弧長跟蹤滑塊,擺動滑塊,送絲機和攝像組件安裝在圓盤上。這些旋轉機器除了應用于更困難的情況,如深、小直徑的孔或全位置內孔堆焊之外,他們可以堆焊的表面與工件運動的情況相同。寧夏自動氬弧堆焊設備寶利蘇迪機器人堆焊設備,可采用編程控制或根據待焊工件形狀自主規劃焊接路徑,實現回轉,直道及擺動焊接。

寶利蘇迪雙鎢極自動熱絲TIG堆焊設備可用于主泵接管、管板、法蘭等產品的鎳基合金或不銹鋼堆焊。SPX-TIGer堆焊系統能夠借助焊接操作架單獨使用,實現產品接管端面、表面平焊位及接管內壁橫焊位置環向堆焊,也可以與焊接回轉臺,變位機配合實現法蘭平面等產品大面積平面堆焊,實現產品局部圓弧區域及直邊段立面堆焊。堆焊設備采用POLYSOUDE雙鎢極和單鎢極熱絲TIG堆焊技術,配合雙鎢極無限回轉焊接機頭,大幅度提高了堆焊的焊接效率,降低人員的勞動強度。
這是一種在圓柱形零件或缸體上執行堆焊操作的傳統機器配置。根據所使用的焊炬,可以在孔的外表面或內壁上進行焊接。這種配置趨于理想,可以在效率(熔敷率)和稀釋率之間找到比較好折衷點。工件被定位并夾持在轉臺或變位機上。待堆焊表面必須與工作臺的旋轉軸同心。焊槍安裝在一組十字滑塊上(AVC和OSC擺動),滑塊行程可根據待焊工件的尺寸調整。如果是深孔堆焊,自動堆焊設備必須有能力支撐2.5m長的堆焊焊槍和相當或比焊槍行程更大的垂直滑塊。監測觀察系統由攝像系統和成像顯示系統等組成。管子內壁堆焊配置此套系統實時觀察焊接過程。
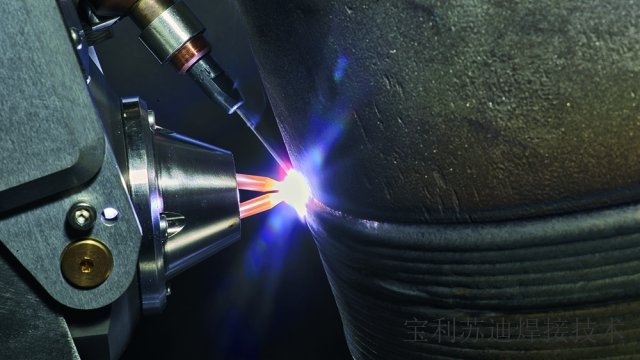
·傳統鎢極氬弧焊是指惰性氣體保護環境下,在鎢極與工件間建立電弧。鎢極承受電弧的高溫,并將之引導至熔合區。電子影響導致母材熔化,形成熔池,并由惰性氣流保護。冷絲氬弧堆焊中熔化填充焊絲所需的能量來自于電弧,因此可獲得的熔化率非常有限。而熱絲氬弧工藝中,焊絲由額外電源提供的單獨電流預熱。熱絲氬弧堆焊可提高熔敷率及生產力,不必降低工藝的可靠性或熔敷層的質量。熱絲氬弧焊接是高質量堆焊操作的基礎,特別是那些涉及復雜形狀,有空間限制或需要更高自動化水平的應用。寶利蘇迪焊接機頭和十字滑塊安裝在操作機上,通過焊接機頭在十字滑塊上的行走實現平板表面堆焊。四川內壁堆焊
寶利蘇迪自動堆焊設備控制系統能滿足焊接速度,氣體流量,電弧長度,電流,擺動,弧壓跟蹤等的聯動控制。河北防腐堆焊機
AVC的工作原理是閉環電壓調節。對于相同的焊接條件,一個給定的電壓對應一個電弧高度。電壓和電弧高度之間的對應關系要求鎢極(作為測量儀器)保持完美狀態。鎢極被用作測量傳感器,這意味著,如果鎢極磨損,不僅電弧柱會被影響,而且會改變鎢極與工件距離和參考電壓之間的初始設定關系。有幾種情況可能會導致電弧高度的變化:鎢極磨削角度的變化;鎢極污染;不正常的過熱(冷卻問題或尺寸不正確)。因此,觀察可以揭示許多可能的AVC不穩定性。河北防腐堆焊機
- 浙江換熱管與管板焊接機器人焊接設備 2025-12-17
- 上海定子屏蔽套環縫焊接機器人管板自動焊接設備 2025-12-17
- 天津自動氬弧焊接機器人設備制造商 2025-12-17
- 陜西窄間隙焊接機器人自動焊接成套設備 2025-12-17
- 中國香港窄間隙焊接機器人堆焊設備 2025-12-17
- 中國澳門J型坡口自動TIG焊接機器人設備生產廠家 2025-12-17
- 海南自動氬弧管板機器人焊接系統 2025-12-17
- 北京自動氬弧管板機器人自動焊接成套設備 2025-12-17
- 河南J型坡口自動TIG焊接機器人管板焊機 2025-12-17
- 北京窄間隙焊接機器人管板自動焊接設備 2025-12-17
- 建鄴區會議管理系統是什么 2025-12-17
- 成都UL認證防火防盜保險箱排名 2025-12-17
- 工業園區一體化自動化組裝設備設備廠家 2025-12-17
- 河南工業安防設施建設 2025-12-17
- 浙江試驗智能設備生產廠家 2025-12-17
- 濱湖區全自動軸類量大從優 2025-12-17
- 海南雙箱自動液壓打包機品牌排行 2025-12-17
- 大型卷繞鍍膜機歡迎選購 2025-12-17
- 虎丘區好的擦拭紙均價 2025-12-17
- 武進區購買污泥干化設備規格尺寸 2025-12-17