應(yīng)用層軟件開發(fā)系統(tǒng)建模全流程解決方案
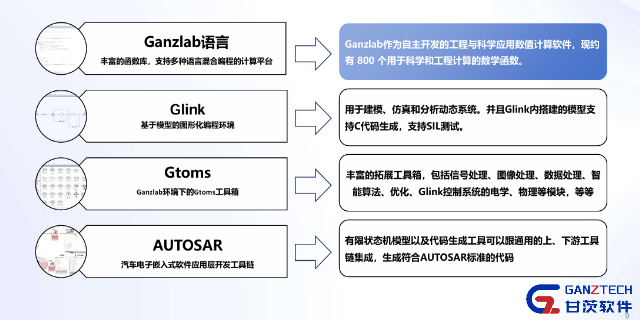
汽車控制器軟件的基于模型設(shè)計(MBD)方法,憑借圖形化建模的直觀性,成為現(xiàn)代汽車電子開發(fā)的重要手段,貫穿研發(fā)全流程。在發(fā)動機控制器ECU開發(fā)中,工程師無需直接編寫代碼,而是通過拖拽模塊搭建燃油噴射量、點火正時的控制模型,能清晰展現(xiàn)不同負荷工況下的參數(shù)調(diào)節(jié)邏輯,輕松排查傳統(tǒng)代碼開發(fā)中難以發(fā)現(xiàn)的邏輯矛盾。針對整車控制器VCU,MBD可整合電機、電池等新能源汽車部件參數(shù),構(gòu)建整車能量管理模型,仿真運動模式、節(jié)能模式下的動力分配與回收效率,在模型階段就能驗證策略是否滿足續(xù)航與動力需求。面對功能復(fù)雜的域控制器開發(fā),MBD的模塊化特性允許不同團隊并行開發(fā)底盤、座艙等子模塊,完成后通過模型集成測試模塊間的數(shù)據(jù)交互,降低系統(tǒng)級問題發(fā)生率。此外,借助模型在環(huán)(MIL)仿真,研發(fā)人員能在沒有物理硬件的情況下開展測試,提前暴露設(shè)計缺陷,不僅縮短開發(fā)周期,還為后續(xù)軟件在環(huán)(SIL)、硬件在環(huán)(HIL)測試提供可靠的模型基礎(chǔ),保障控制器軟件質(zhì)量。基于模型設(shè)計的開發(fā)優(yōu)勢,體現(xiàn)在全流程可追溯,仿真驗證及時,能提升效率減少差錯。應(yīng)用層軟件開發(fā)系統(tǒng)建模全流程解決方案

車載通信系統(tǒng)建模聚焦于車內(nèi)各類網(wǎng)絡(luò)的信號傳輸邏輯與可靠性驗證,覆蓋CAN/LIN總線、車載以太網(wǎng)等多種通信方式。CAN總線建模需定義報文ID、數(shù)據(jù)長度與傳輸周期,通過構(gòu)建總線調(diào)度模型,計算不同節(jié)點(如發(fā)動機ECU、ABS控制器)的報文發(fā)送錯誤概率,優(yōu)化總線負載率以確保關(guān)鍵信號(如制動指令)的實時性。LIN總線建模針對車身電子等低速率場景,模擬主從節(jié)點的通信協(xié)議,驗證燈光、雨刮等控制信號的傳輸延遲,避免因通信延遲導(dǎo)致的功能異常。車載以太網(wǎng)建模則需考慮高帶寬需求,構(gòu)建通信協(xié)議棧模型,仿真自動駕駛多傳感器(激光雷達、攝像頭)的海量數(shù)據(jù)傳輸過程,分析網(wǎng)絡(luò)擁塞對數(shù)據(jù)同步的影響。建模過程需整合通信硬件特性(如傳輸速率、抗干擾能力),通過仿真模擬電磁干擾、線束阻抗變化等工況,驗證通信系統(tǒng)的容錯能力,確保車內(nèi)信號傳輸?shù)姆€(wěn)定性與安全性。安徽車載通信基于模型設(shè)計國產(chǎn)平臺汽車控制器軟件基于模型設(shè)計國產(chǎn)平臺,支持圖形化建模與代碼生成,適配多類控制器開發(fā)。
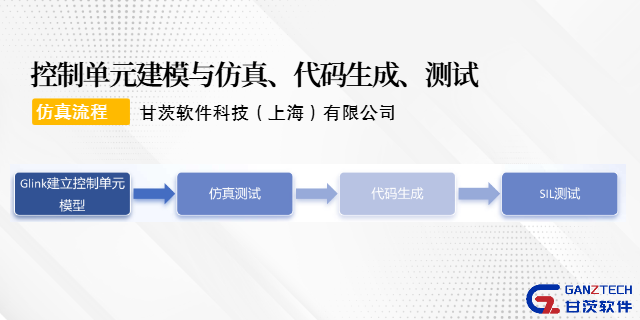
應(yīng)用層軟件開發(fā)MBD通過圖形化建模將功能需求轉(zhuǎn)化為可執(zhí)行模型,覆蓋邏輯設(shè)計、仿真驗證到代碼生成的全流程。在汽車電子應(yīng)用層開發(fā)中,可針對發(fā)動機控制器ECU的傳感器信號處理、執(zhí)行器驅(qū)動邏輯構(gòu)建模塊化模型,每個功能模塊通過清晰接口傳遞數(shù)據(jù),直觀呈現(xiàn)“信號輸入-邏輯運算-指令輸出”的完整鏈路。建模過程支持狀態(tài)機邏輯設(shè)計,如車身電子控制中的燈光切換、門窗調(diào)節(jié)等功能,能通過狀態(tài)轉(zhuǎn)移圖定義不同輸入(如遙控指令、車內(nèi)按鍵)對應(yīng)的執(zhí)行動作,避免邏輯漏洞。MBD工具可自動將驗證通過的模型轉(zhuǎn)化為嵌入式代碼,減少手動編碼錯誤,同時支持模型與代碼的一致性校驗,確保應(yīng)用層軟件能穩(wěn)定運行在目標硬件上,提升開發(fā)效率與質(zhì)量。
智能交通系統(tǒng)基于模型設(shè)計的好用軟件,需具備交通流建模、信號控制邏輯仿真等功能。在交通流量預(yù)測模塊,應(yīng)能整合歷史車流量數(shù)據(jù)與實時路況信息,構(gòu)建宏觀交通流模型,準確計算不同時段的道路通行能力,為信號配時優(yōu)化提供數(shù)據(jù)支撐。針對智能路口控制,軟件需支持信號燈相位切換邏輯的可視化建模,模擬不同配時方案下的車輛延誤時間,通過對比分析選出合理控制策略。車路協(xié)同仿真功能也不可或缺,能搭建車輛與路側(cè)設(shè)備的通信模型,驗證信息交互延遲對協(xié)同決策的影響,確保自動駕駛車輛在復(fù)雜交通場景中的響應(yīng)可靠性。好用的軟件還應(yīng)具備開放的模型接口,可與交通監(jiān)控系統(tǒng)、車輛導(dǎo)航平臺的數(shù)據(jù)對接,實現(xiàn)仿真結(jié)果與實際交通狀況的動態(tài)校準,提升模型對智能交通系統(tǒng)設(shè)計的指導(dǎo)價值。機器人領(lǐng)域MBD可用合適工具,搭模型、做仿真,調(diào)出來的機器人動作準,開發(fā)也快。
汽車電子應(yīng)用層軟件開發(fā)中的系統(tǒng)建模,是將抽象的功能需求轉(zhuǎn)化為可操作模型的關(guān)鍵步驟,為團隊協(xié)作與高效開發(fā)提供支撐。在車身控制器開發(fā)中,建模需圍繞燈光、門鎖等控制功能展開,通過狀態(tài)機模型清晰定義各功能的觸發(fā)條件與執(zhí)行路徑,比如遙控鑰匙解鎖時,模型能明確門鎖電機的轉(zhuǎn)動時長、轉(zhuǎn)向燈的閃爍邏輯,確保功能實現(xiàn)無遺漏。發(fā)動機控制器ECU的應(yīng)用層建模,需將空氣流量傳感器信號處理、噴油器驅(qū)動等功能拆分為單獨模塊,每個模塊都有標準化的輸入輸出接口,方便不同工程師同步開發(fā),減少溝通成本。建模時還要充分考慮擴展性,采用統(tǒng)一的模型架構(gòu)設(shè)計,當(dāng)需要增加自適應(yīng)巡航、智能啟停等新功能時,只需開發(fā)對應(yīng)子模塊并接入現(xiàn)有模型,無需重構(gòu)整體框架。這種建模方式能在開發(fā)初期就梳理清楚各功能的邊界與交互關(guān)系,避免后期集成時出現(xiàn)接口不匹配問題,同時為自動代碼生成提供合格的模型源,有效提升應(yīng)用層軟件的開發(fā)效率與可靠性。汽車領(lǐng)域MBD建模服務(wù)價格,需結(jié)合建模復(fù)雜度與服務(wù)范圍,合理定價且保障服務(wù)質(zhì)量更關(guān)鍵。烏魯木齊圖形化建模系統(tǒng)建模
實用的應(yīng)用層軟件開發(fā)系統(tǒng)建模軟件,可融合控制邏輯與仿真驗證,建模過程中能實時查看效果。應(yīng)用層軟件開發(fā)系統(tǒng)建模全流程解決方案
電子與通信領(lǐng)域MBD是將復(fù)雜系統(tǒng)功能需求轉(zhuǎn)化為可執(zhí)行模型的開發(fā)方法,貫穿從算法設(shè)計到代碼實現(xiàn)的全流程。在集成電路設(shè)計中,MBD支持數(shù)字信號處理(DSP)算法的圖形化建模,工程師可通過搭建濾波器、調(diào)制解調(diào)器等模塊,模擬5G基帶信號的處理過程,精確計算信噪比、誤碼率等關(guān)鍵指標,優(yōu)化算法性能。通訊設(shè)備嵌入式軟件開發(fā)中,MBD能將設(shè)備控制邏輯(如射頻模塊功率調(diào)節(jié)、信道切換)轉(zhuǎn)化為狀態(tài)機模型,通過仿真驗證不同輸入信號對應(yīng)的執(zhí)行動作,確保控制邏輯的完整性。針對通訊網(wǎng)絡(luò)協(xié)議開發(fā),MBD可構(gòu)建協(xié)議棧的分層模型,模擬物理層、數(shù)據(jù)鏈路層、網(wǎng)絡(luò)層的交互過程,分析協(xié)議開銷對傳輸效率的影響,為協(xié)議優(yōu)化提供量化依據(jù)。該方法支持模型與代碼的自動轉(zhuǎn)換,能生成符合嵌入式系統(tǒng)要求的高效代碼,同時通過模型在環(huán)、軟件在環(huán)等多階段驗證,確保電子與通信系統(tǒng)的功能正確性與性能指標達標。應(yīng)用層軟件開發(fā)系統(tǒng)建模全流程解決方案
- 沈陽電磁特性汽車仿真項目報價 2025-12-24
- 銀川自動駕駛汽車模擬仿真與實車測試誤差大嗎 2025-12-23
- 長春基于模型設(shè)計 2025-12-23
- 河北智能MBD什么品牌好 2025-12-23
- 青海新能源汽車仿真驗證外包服務(wù) 2025-12-23
- 北京汽車電子控制系統(tǒng)控制器算法有哪些開發(fā)公司 2025-12-23
- 河北需求分析基于模型設(shè)計服務(wù)價格 2025-12-23
- 山東底盤控制汽車仿真服務(wù)內(nèi)容 2025-12-23
- 浙江新能源控制器算法的作用 2025-12-23
- 天津低成本科學(xué)計算品牌 2025-12-22
- 福建短視頻運營品牌企業(yè) 2025-12-24
- 浙江網(wǎng)絡(luò)安全工程哪幾種 2025-12-24
- 鳳陽好的短視頻運營比較 2025-12-24
- 山東多功能蘋果電腦測試設(shè)備 2025-12-24
- 虹口區(qū)使用戶外裸眼3D廠家現(xiàn)貨 2025-12-24
- 北海一體化檔案庫房管理 2025-12-24
- 鎮(zhèn)江66物聯(lián)電動車充電樁直銷 2025-12-24
- 靜安區(qū)樓宇智能化系統(tǒng)設(shè)備哪家比較好 2025-12-24
- 江寧區(qū)數(shù)據(jù)定向分析歡迎選購 2025-12-24
- 會議室改造調(diào)節(jié) 2025-12-24