青海新能源汽車仿真驗證外包服務
汽車軟件測試仿真驗證貫穿于軟件開發(fā)全流程,通過模型在環(huán)(MIL)、軟件在環(huán)(SIL)、硬件在環(huán)(HIL)等多層級測試,實現(xiàn)對控制算法與軟件邏輯的逐步驗證。MIL階段聚焦于算法邏輯的正確性,通過搭建控制模型與虛擬環(huán)境,測試軟件在理想工況下的功能實現(xiàn);SIL階段則將生成的目標代碼放入仿真環(huán)境,驗證代碼執(zhí)行效率與邏輯一致性,排查內存泄漏、時序矛盾等問題。針對自動駕駛軟件,仿真驗證需覆蓋多傳感器融合、路徑規(guī)劃等模塊,通過海量虛擬場景測試軟件的魯棒性。這種分層驗證方式能在軟件開發(fā)早期發(fā)現(xiàn)潛在問題,明顯降低后期實車測試的成本與風險,確保汽車軟件滿足功能安全標準與實際性能要求。新能源汽車整車仿真服務常含性能預測、問題診斷等內容,實用性方面表現(xiàn)較好。青海新能源汽車仿真驗證外包服務

自動駕駛汽車仿真測試軟件需構建覆蓋感知、決策、控制全鏈路的虛擬測試環(huán)境。軟件應能生成多樣化場景庫,包含不同路況、天氣與交通參與者,支持激光雷達、攝像頭等傳感器的仿真,模擬其在復雜環(huán)境下的信號特性(如噪聲、畸變、不同光照下的圖像效果)。決策層測試需支持路徑規(guī)劃、行為預測算法的驗證,分析不同場景下的決策安全性;控制層則需結合車輛動力學模型,測試轉向、制動指令的執(zhí)行效果。軟件還應具備場景回放與數(shù)據分析功能,量化算法的性能指標,為自動駕駛系統(tǒng)(尤其是L2+級輔助駕駛)的迭代優(yōu)化提供可靠依據。青海新能源汽車仿真驗證外包服務整車協(xié)同汽車模擬仿真能實現(xiàn)底盤、電驅等系統(tǒng)的聯(lián)動模擬,便于發(fā)現(xiàn)各系統(tǒng)配合中的潛在問題。
汽車動力性仿真工具的準確性取決于動力系統(tǒng)模型精度與行駛阻力模擬的真實性。準確的工具需能搭建包含發(fā)動機/電機、變速箱、傳動系統(tǒng)的完整動力模型,準確輸入動力部件的特性參數(shù),如發(fā)動機外特性曲線、電機扭矩特性、變速箱速比。在行駛阻力模擬方面,需考慮空氣阻力、滾動阻力、坡度阻力的精確計算,反映不同車速、路況下的阻力變化。工具應能仿真0-100km/h加速時間、最高車速、最大爬坡度等動力性指標,且仿真結果需與實車測試具有良好的一致性。同時支持參數(shù)敏感性分析,通過調整動力部件參數(shù)評估對動力性能的影響,為動力系統(tǒng)選型與參數(shù)優(yōu)化提供準確參考。
為了讓建模和計算更高效,通常會對一些次要因素進行簡化,比如忽略小部件的慣性影響或者簡化復雜的流體運動,這就難免會帶來偏差。參數(shù)的準確性也很關鍵,像輪胎和地面的摩擦系數(shù)、車輛行駛時的空氣阻力系數(shù)等,如果這些數(shù)據不夠準確,仿真結果自然會和實際情況有出入,所以必須用實車測試數(shù)據來校準這些參數(shù)。另外,實際駕駛中的環(huán)境因素比如風速變化、路面的起伏程度都帶有隨機性,仿真時很難完全模擬,也會造成誤差。在實際工程里,工程師會采用高保真度的建模方法,融合多渠道數(shù)據來修正模型參數(shù),再用機器學習算法優(yōu)化仿真邏輯,這樣就能把加速時間、制動距離等關鍵性能指標的誤差降到很低,完全能滿足汽車開發(fā)的需求。汽車模擬仿真工具的準確性,可從模型精細度、場景覆蓋度及實車數(shù)據吻合度綜合判斷。
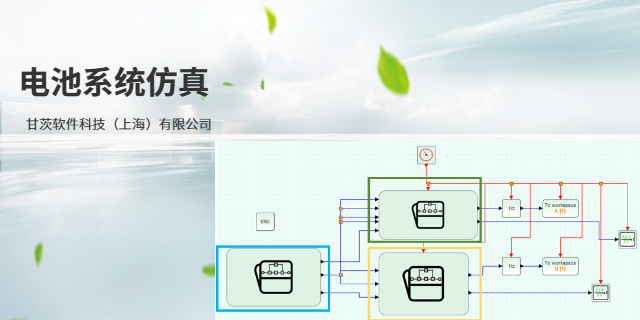
汽車電驅動系統(tǒng)建模仿真涵蓋電機本體、控制器與傳動機構的協(xié)同分析,是優(yōu)化電驅動效率的重要手段。電機建模需精確描述永磁同步電機的電磁特性,包含磁鏈、電感的非線性變化,通過有限元分析計算不同工況下的銅損、鐵損;控制器模型則需搭建FOC控制算法框架,模擬電流環(huán)、速度環(huán)的PI調節(jié)器動態(tài)響應,優(yōu)化弱磁控制策略。傳動系統(tǒng)建模需考慮齒輪嚙合間隙、減速器效率,分析動力傳遞過程中的能量損耗。通過聯(lián)合仿真可獲得電驅動系統(tǒng)的效率Map圖,為整車能量管理策略開發(fā)提供關鍵數(shù)據,助力新能源汽車續(xù)航能力提升。電池系統(tǒng)汽車模擬仿真需綜合續(xù)航、安全等指標,這樣才能保證模擬結果具有實用價值。江西電池系統(tǒng)汽車仿真
汽車仿真驗證服務內容通常包括模型構建、性能測試及優(yōu)化建議,支撐研發(fā)決策。青海新能源汽車仿真驗證外包服務
整車半主動懸架仿真及優(yōu)化測試軟件需具備多體動力學建模與控制算法聯(lián)合仿真能力。軟件應能搭建包含彈簧、阻尼器、導向機構的懸架多體模型,準確定義彈性元件剛度、阻尼系數(shù)等參數(shù),模擬懸架在不同路面激勵下的動態(tài)響應。同時支持與控制算法模型(如PID控制、模型預測控制)聯(lián)合仿真,分析阻尼調節(jié)策略對車身姿態(tài)的影響,如側傾抑制、振動衰減效果。優(yōu)化模塊需能通過參數(shù)迭代,尋找不同工況下的阻尼系數(shù),提升乘坐舒適性與操縱穩(wěn)定性。這類軟件需適配整車多體動力學模型,實現(xiàn)懸架系統(tǒng)與整車性能的協(xié)同分析,為半主動懸架的參數(shù)匹配與控制策略優(yōu)化提供可靠工具。青海新能源汽車仿真驗證外包服務
- 銀川自動駕駛汽車模擬仿真與實車測試誤差大嗎 2025-12-23
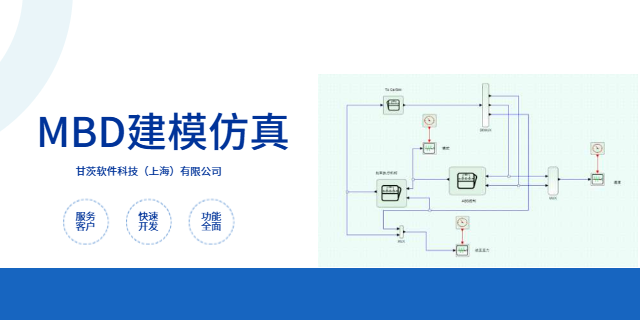
- 長春基于模型設計 2025-12-23
- 河北智能MBD什么品牌好 2025-12-23
- 青海新能源汽車仿真驗證外包服務 2025-12-23
- 北京汽車電子控制系統(tǒng)控制器算法有哪些開發(fā)公司 2025-12-23
- 山東底盤控制汽車仿真服務內容 2025-12-23
- 浙江新能源控制器算法的作用 2025-12-23
- 天津低成本科學計算品牌 2025-12-22
- 江西汽車發(fā)動機科學分析什么軟件好用 2025-12-22
- 天津汽車系統(tǒng)建模服務商推薦 2025-12-22
- 天津打印紙有幾種 2025-12-23
- 浙江PCBA的全自動功能測試一體化 2025-12-23
- 射洪進口工業(yè)組態(tài)網關 2025-12-23
- 吉林KC認證哪家性價比高 2025-12-23
- 北京推進**智能撰寫 2025-12-23
- 芯片堆疊封裝 2025-12-23
- 內蒙古國產數(shù)字化轉型方案 2025-12-23
- 寶山區(qū)省電分離萃取設備 2025-12-23
- 銀川自動駕駛汽車模擬仿真與實車測試誤差大嗎 2025-12-23
- 江蘇購買商管ERP軟件定制開發(fā) 2025-12-23