重慶國產化目標識別經驗豐富
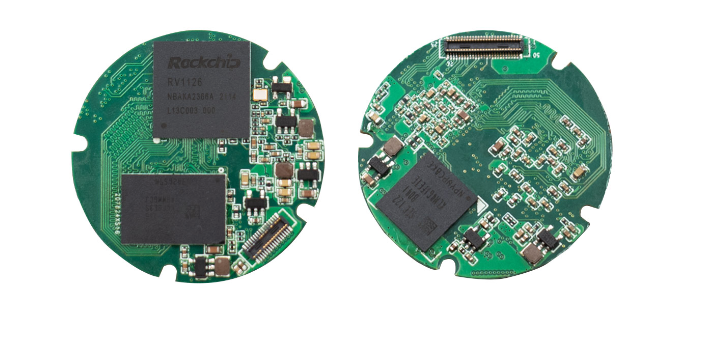
由于無人機飛得高,肉眼可見甚至為一個小點,一般的算法就很難派上用場。慧視光電的算法工程師針對這一難題,通過增加小目標的訓練樣本數量,放大圖像或特征使小目標變為大目標,增加小目標的正樣本數量。推出了針對小型飛行物的質心小目標識別算法,經過不斷的測試驗證,算法已經在RV1126、RK3588等系列圖像處理板上有著穩定的表現。具備識別能力后,就需要派出本方無人機對敵對無人機進行鎖定打擊。在無人機上加裝慧視RV1126系列的Viztra-LE044圖像處理板,通過算法加持實現對敵方無人機的識別鎖定,然后無人機自動起飛,沖擊目標無人機,實現反制。這樣的方法雖然簡單,但卻很實用,并且RV1126圖像處理板的造價和FPV的造價都能得到有效控制,這樣的反制措施既經濟又高效。無人機吊艙用AI識別模塊定制。重慶國產化目標識別經驗豐富
目標識別
工業4.0正在不斷發展,其中很重要的一項工作就是實現工廠無人化、自動化。在自動化領域,想要實現完整的無人化,就需要人工智能的強勢介入,通過攝像頭的AI智能化能夠實現這個目標。AI攝像頭就猶如工程師的眼睛一樣,能夠洞察一切。這雙眼睛的精度就由AI圖像處理板和算法共同決定,其中選對圖像處理板這個硬件是基礎。作為AI檢測的重要部件,圖像處理板能夠深度分析攝像頭獲取的信息,通過深度學習算法的優化,從而進行圖像識別功能。四川國產化目標識別售價應急救援的識別模塊怎么購買?
CVBS英文全稱為Composite Video Broadcast Signal 或 Composite Video Blanking and Sync。中文翻譯為復合視頻廣播信號 或 復合視頻消隱和同步。CVBS 是被大量使用的標準,也叫做基帶視頻或RCA視頻,是(美國)國家電視標準委員會(NTSC)電視信號的傳統圖像數據傳輸方法,它以模擬波形來傳輸數據。復合視頻包含色差(色調和飽和度)和亮度(光亮)信息,并將它們同步在消隱脈沖中,用同一信號傳輸。它是一個模擬電視節目(圖像)信號在與聲音信號結合,并調制到射頻載波之前的一種格式。在快速掃描的NTSC電視中,甚高頻(VHF)或超高頻(UHF)載波是復合視頻所使用的調制振幅,這時產生的信號大約有6MHz寬。一些閉路電視系統使用同軸電纜近距離傳輸復合視頻,一些DVD播放器和視頻磁帶錄像機(VCR)通過蓮花插座提供復合視頻輸入和輸出,這個插座也叫做RCA連接器 。成都慧視能夠根據需求定制開發RV1126和RK3588系列的CVBS接口的AI圖像處理板。
戶外探險已是當下一個時興的運動,但是這種運動帶來了一個問題,那就是救援。當探險者迷失在山林間,會給救援造成許多困難,復雜的地形阻擋了被困者也阻擋著救援團隊,而探險者可能處于失去聯絡的狀態,救援團隊則不知道被困位置。在崇山峻嶺間,救援就是在和死神賽跑,對于救援團隊救援技術都有著高要求。傳統的人工搜索效率低下,顯然不能滿足救援需求,無人機的應用則和人工救援形成了一定的互補。無人機機動靈活的特點,可以搜尋人工難以抵達的區域,同時無人機升空的視野更廣闊看得更遠,即便是在夜間,搭載紅外傳感器的無人機也能夠進行高效工作。而這之中,圖像算法則能夠賦能AI搜救,通過定制算法,能夠快速排查、定位目標人員位置,在大范圍遠距離的觀察者有時候比人眼好使。導引頭智慧眼哪里有?
當紅炸子雞DeepSeek,無論是行業內還是行業外都在研究。畢竟現在各行各業都想利用AI為自己服務,圖像處理領域也不例外。于是便有很多人向我們咨詢RK3588+DeepSeek有沒有“搞頭”?但是只靠RK3588自身是不現實的!但是可以外接高算力模塊。DeepSeek的作用主要是作為一個前端決策大腦,在圖像處理時可以幫我們對圖像處理板處理的數據進行智能化決策,是實現全自動化作業的步驟之一。要達到這個目的,需要的數據不可估量,因此越是大參數版本的DeepSeek模型越好,像完整版的DeepSeek模型671B的參數量級,以RK3588現在6.0TOPS的算力來看,顯然不可能。無人車避障選擇什么樣的識別模塊?海南專業目標識別24小時服務
MIPI相機目標識別方案。重慶國產化目標識別經驗豐富
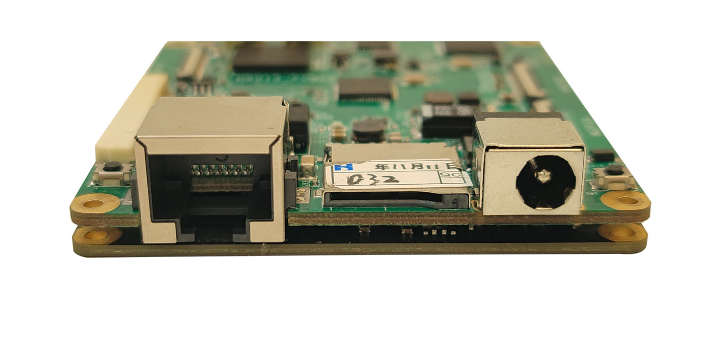
成都慧視能夠根據客戶需求,提供圖像處理板硬件,包括處理器(如ARM、FPGA等)、存儲設備(如DDR5內存)以及相關的接口和連接組件(如Camera link、SDI、網口、PCIE、HDMI等)。支持多種圖像處理需求,如高分辨率圖像采集、高幀視頻處理、深度學習推理等。成都慧視提供完整的軟件棧,包括操作系統適配、驅動程序、圖像處理算法庫(如OpenCV等)以及深度學習框架的優化支持。支持從圖像采集、預處理到特征提取、目標檢測、脫靶量輸出等全流程的算法開發與優化。重慶國產化目標識別經驗豐富
- 附近圖像處理板是什么 2025-12-18
- 山東圖像處理板檢測 2025-12-17
- 天津高性能圖像處理板 2025-12-17
- 無源圖像處理板技術 2025-12-17
- 湖北智慧工地AI智能供應商 2025-12-17
- 貴州智慧交通AI智能減員增效 2025-12-17
- 福建質量目標跟蹤 2025-12-17
- 新疆質量圖像處理板 2025-12-17
- 寧夏低壓線目標識別編號 2025-12-17
- 江蘇附近目標跟蹤 2025-12-17
- 什么HRP系統性價比 2025-12-18
- 出口HRP系統價格 2025-12-18
- 浙江定制小程序開發優勢 2025-12-18
- 廣東桌面虛擬化應用場景 2025-12-18
- 北京附近智慧環衛系統應用 2025-12-18
- 石景山區新款智慧課堂圖片 2025-12-18
- 宜興本地工廠物聯網通信系統優勢 2025-12-18
- 柳州六類線 水晶頭 2025-12-18
- 新吳區全速智能控制集成服務商服務熱線 2025-12-18
- 江蘇本地信息系統集成服務商廠家電話 2025-12-18