貴州自動內孔堆焊電源
寶利蘇迪焊接操作機配合焊接機頭進行焊接,為焊接過程提供一個穩定可靠的環境。操作機由底座,立柱,橫梁,以及控制系統組成。橫臂進給過程穩定,保證了熱絲TIG焊接的精度,可以有效地與焊接機頭聯動。具有穩定可靠的防墜自鎖功能,有效地保障了生產的安全性。操作機的橫梁水平運動及垂直運動的導向副可進行精密定位。立柱和橫梁具有很高的抗變形能力。橫臂升降式數控系統控制的一個軸,參與堆焊面的布道。操作機主骨架具有很強的連接剛性和很好的抗變形能力及較好的美觀感。寶利蘇迪堆焊機頭包括焊槍升降、擺動機構、步進、角度調節機構,氣路、水冷系統,操作盤、焊絲盤等。貴州自動內孔堆焊電源

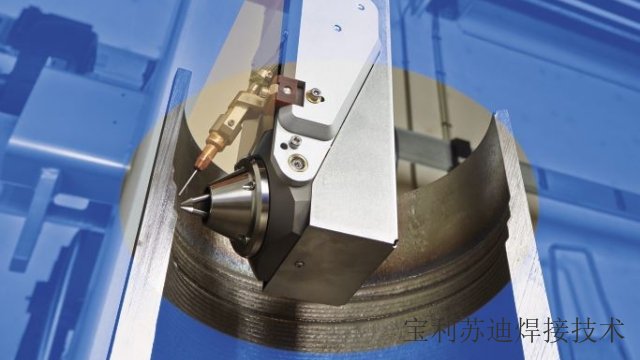
在焊接之外,AVC滑塊用于焊槍定位或準備起弧。自動焊接的第一步是通過AVC滑動運動使電極接觸工件。接觸點是通過電極和工件之間的閉合回路來檢測的。擺動滑塊,在較少情況下用于焊接前的定位,只有當需要一個或兩個參考邊時才需要(例如,在凹槽中心定位或相對于參考面進行定位)。在焊接過程中,擺動滑塊可能與焊接電流同步進行振蕩運動,或使軌跡被重置或偏移(例如步進)。擺動功能需保證擺動的高精度和高穩定性,可以和焊接電流脈沖同步運動來保證厚壁情況下的側壁熔合,支持對填充及蓋面情況多種擺動模式控制。云南熱絲TIG堆焊寶利蘇迪長管內壁堆焊設備中,工件由端部旋轉頭架驅動旋轉,焊槍由鋼絲繩牽拉和導向裝置定位并完成堆焊。

AVC滑塊、OSC滑塊具有特殊的重要性,因為它們直接干預焊接過程控制。AVC裝置由動力滑塊、測量系統和閉環調節系統組成。系統需要檢測焊炬(靠近鎢極處)的電弧電壓,以限制線束長度產生的線路損耗影響。AVC的工作原理是基于電弧高度和產生的電壓值之間的直接關系(特定電流值情況下)。在正常工作范圍內(氬氣保護下焊接,電流30A以上),AVC克服了所有的不規則性,確保電弧特性的恒定,從而增強了焊珠的規律性。各種相關功能有助于更精細地控制AVC滑塊的反應,使其更具反應性,抑制其運動或延遲對焊縫池的影響。此外,AVC滑塊的運動在焊接程序中進行編程,并與焊接電流同步。
寶利蘇迪6至12米的標準管的內壁堆焊設備與2米管的堆焊設備相同,不同的是需要有一個特殊的裝置來支撐焊槍。該應用的難度在于在一個難度極高的環境下引導焊槍,管子直徑小以及內部溫度高。解決方案需要一個基于12米長的鋼絲繩焊槍引導系統,長度與待堆焊管子的長度相當。鋼絲繩穿過管子,然后拉緊以限制焊槍偏轉。裝有兩個焊炬,每個焊炬分別有兩路熱絲的焊槍被布置在管子端部。堆焊然后通過拉焊槍的方式進行。兩個熱絲TIG電源互相同步,且與焊槍支撐前進和旋轉動作同步。寶利蘇迪視頻監控系統可用于堆焊前焊槍的輔助定位,堆焊時實時監控焊接狀態。
用于固定工件水平位置焊接的自動氬弧堆焊設備通常包括:適當的工件支撐(工作臺或支架)和一個配有端部接口的操作機(焊炬、AVC和擺動滑塊、送絲裝置和用于動力、流體和運動的電纜/線束)。此類應用中,工件是固定不動的,例如閥座部件的現場堆焊維修,由于閥門是固定不動的,所以水平堆焊設備需要安裝固定在閥門上,配備寶利蘇迪POLYSOUDESPX無限旋轉機頭,通過焊槍的圓周運動實現閥座閥門的現場堆焊修復,多層多道焊接。SPX機頭內置一體化的無限回轉機構具有焊接電流、熱絲電流、系統接地、焊槍冷卻水進出、焊槍保護氣的無限制旋轉過程的穩定動態連接和密封能力,同時實現電流、電弧電壓、系統工作邏輯信號、送絲控制信號和焊接高清視頻信號燈的無限制旋轉過程的穩定連接,徹底解決全位置焊接中的線束纏繞問題,極大地提高了焊接生產效率,簡化了設備結構和操作難度。寶利蘇迪提供耐磨堆焊設備、耐腐蝕堆焊設備,防腐堆焊設備、維修堆焊設備,堆焊機器人設備。廣東管件堆焊
寶利蘇迪機頭導向鋼絲繩用于承托12米焊炬深入焊管,并為焊炬在管內提供導向作用。貴州自動內孔堆焊電源
寶利蘇迪數據采集系統由數據采集卡,數據采集儀組成。其中數據采集卡安裝于焊接電源中,直接采集焊接電源的各項參數發送給數據采集儀。數據采集儀安裝于視頻控制柜中,將來自數據采集卡的信號進行整理和分析,實現熱絲電流,焊接電流,焊接電壓,焊接速度,送絲速度等數據的實時采集。采集數據在系統后臺自動生成數據記錄文件,自動命名,保存在電腦的預設位置。實時數據采集系統還具備焊接參數監控功能。一旦實際參數超過范圍,程序會根據預先設置采取給出報警信息或衰減停止焊接過程等相應自動處理程序。貴州自動內孔堆焊電源
- 安徽零部件焊接機器人窄間隙焊機 2025-12-18
- 遼寧自動熱絲TIG窄間隙焊接機器人系統 2025-12-18
- 云南自動熱絲TIG窄間隙焊接機器人自動焊接成套設備 2025-12-18
- 陜西自動TIG焊接機器人管對管板焊接設備 2025-12-18
- 自動氬弧焊接機器人焊接系統 2025-12-18
- 浙江換熱管與管板焊接機器人堆焊設備 2025-12-18
- 重慶換熱管與管板焊接機器人焊接設備制造商 2025-12-18
- 西藏零部件焊接機器人焊接設備生產廠家 2025-12-18
- 內蒙古懸吊管托塊焊接機器人窄間隙焊機 2025-12-18
- 云南自動TIG焊接機器人系統 2025-12-18
- 隨州航空零件加工 2025-12-18
- 硬質合金用真空氣氛爐廠家哪家好 2025-12-18
- 遼寧TL大扭矩扭力限制器需要多少錢 2025-12-18
- 濟南零冷水安裝說明 2025-12-18
- 嘉興生物醫學實驗室工程 2025-12-18
- 上海船舶發動機電子調速器結構 2025-12-18
- 楊浦區工業自動控制系統裝置哪個好 2025-12-18
- 儀景通儀景通熒光光譜儀分析儀維修維修 2025-12-18
- 心理教學設備服務商 2025-12-18
- 北京可折疊絲桿滑臺安裝教程 2025-12-18